Open loop motion control
12.10 Advanced topics
S7-200 SMART
548 System Manual, 09/2015, A5E03822230-AC
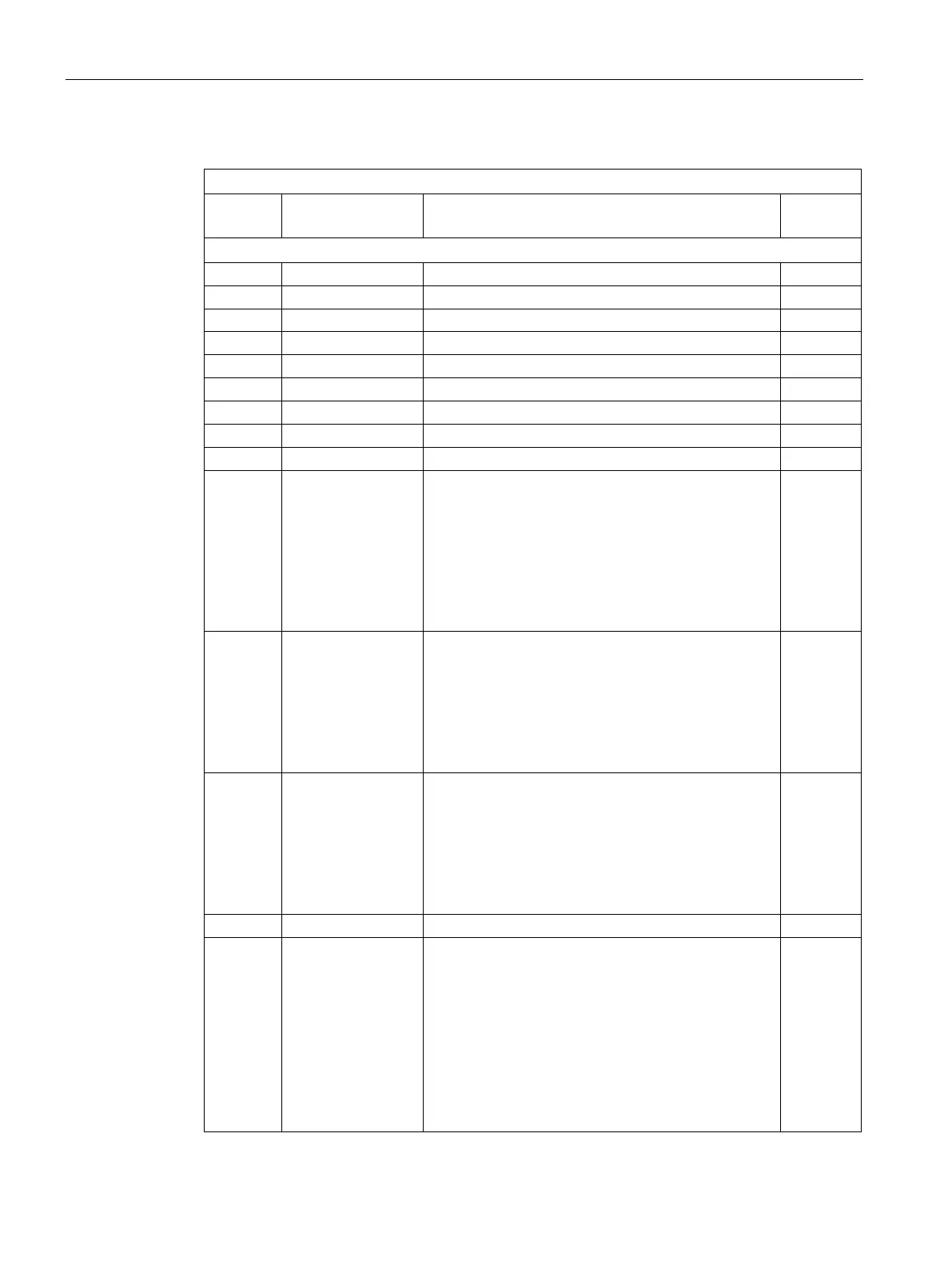
Table 12- 38 Configuration/Profile table: Configuration block
Configuration/Profile table
Axis of Motion identification field
Length of the configuration block in bytes (1 byte)
Length of the interactive block in bytes (1 byte)
7 PF_LEN Length of a single profile in bytes (1 byte) --
Length of a single step in bytes (1 byte)
9 STEPS Number of steps allowed per profile (1 byte) --
Number of profiles from 0 to 32 (1 byte)
14 STOP_RSP Specifies the drive's response to the STP input
(1 byte):
• 0: No action. Ignore input condition.
• 1: Decelerate to a stop and indicate STP input
active.
• 2: Terminate pulses and indicate STP input.
• 3 to 255: Reserved (error if specified)
--
15 LMT-_RSP Specifies the drive's response to the negative limit
input (1 byte):
• 0: No action. Ignore input condition.
• 1: Decelerate to a stop and indicate limit reached.
• 2: Terminate pulses and indicate limit reached.
• 3 to 255: Reserved (error if specified)
--
16 LMT+_RSP Specifies the drive's response to the positive limit
input (1 byte):
• 0: No action. Ignore input condition.
• 1: Decelerate to a stop and indicate limit reached.
• 2: Terminate pulses and indicate limit reached.
• 3 to 255: Reserved (error if specified)
--
18 MEAS_SYS Specifies the measurement system used to describe
moves (1 byte):
• 0: Pulses (speed measured in pulses/sec and
position values measured in pulses; values are
double integer)
• 1: Engineering units (speed measured in units/sec
and position values measured in units; values are
single precision real)
• 2 to 255: Reserved (error if specified)
--

 Loading...
Loading...










