Open loop motion control
12.10 Advanced topics
S7-200 SMART
System Manual, 09/2015, A5E03822230-AC
549
Configuration/Profile table
20 PLS/REV Specifies the number of pulses per revolution of the
motor, (only applicable when MEAS_SYS is set to 1) -
(4 bytes)
DInt
24 UNITS/REV Specifies the engineering units per revolution of the
motor, (only applicable when MEAS_SYS is set to 1) -
Real
28 UNITS Reserved for STEP 7-Micro/WIN SMART to store a
custom units string (4 bytes)
--
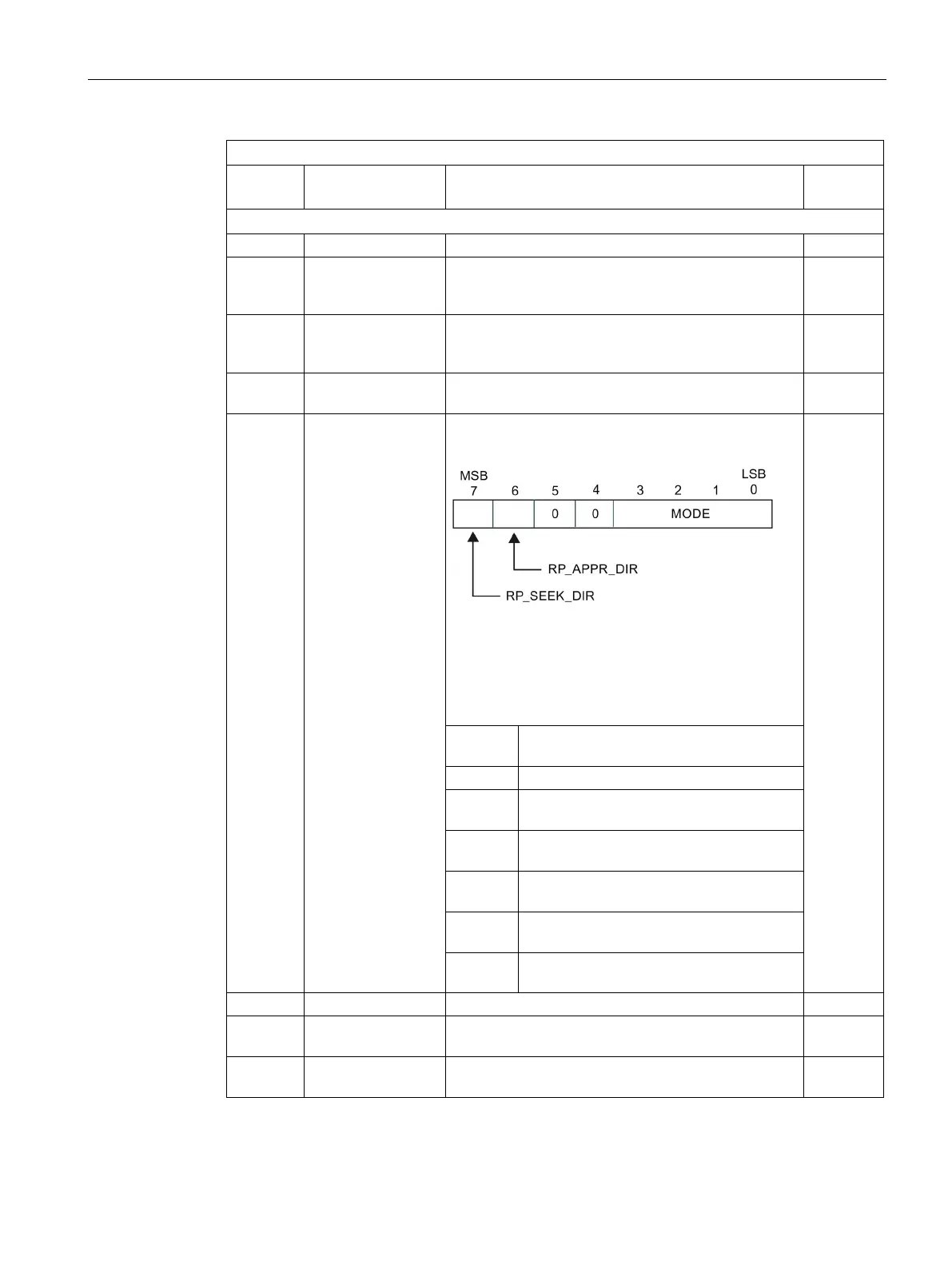
32 RP_CFG Specifies the reference point search configuration
(1 byte):
RP_SEEK_DIR: This bit specifies the starting direction
for a reference point search (0 - positive direction, 1 -
negative direction).
RP_APPR_DIR: This bit specifies the approach direc-
tion for terminating the reference point search (0 -
positive direction, 1 - negative direction).
--
MODE Specifies the reference point search meth-
Reference point search disabled.
'0001' The reference point is where the RPS
'0010' The reference point is centered within the
active region of the RPS input.
'0011' The reference point is outside the active
'0100' The reference point is within the active
'0101' to
'1111'
Reserved (error if selected)
34 RP_Z_CNT Number of pulses of the ZP input used to define the
reference point (4 bytes)
DInt
38 RP_FAST Fast speed for the RP seek operation: MAX_SPD or
DInt/Real

 Loading...
Loading...










