Open loop motion control
12.10 Advanced topics
S7-200 SMART
550 System Manual, 09/2015, A5E03822230-AC
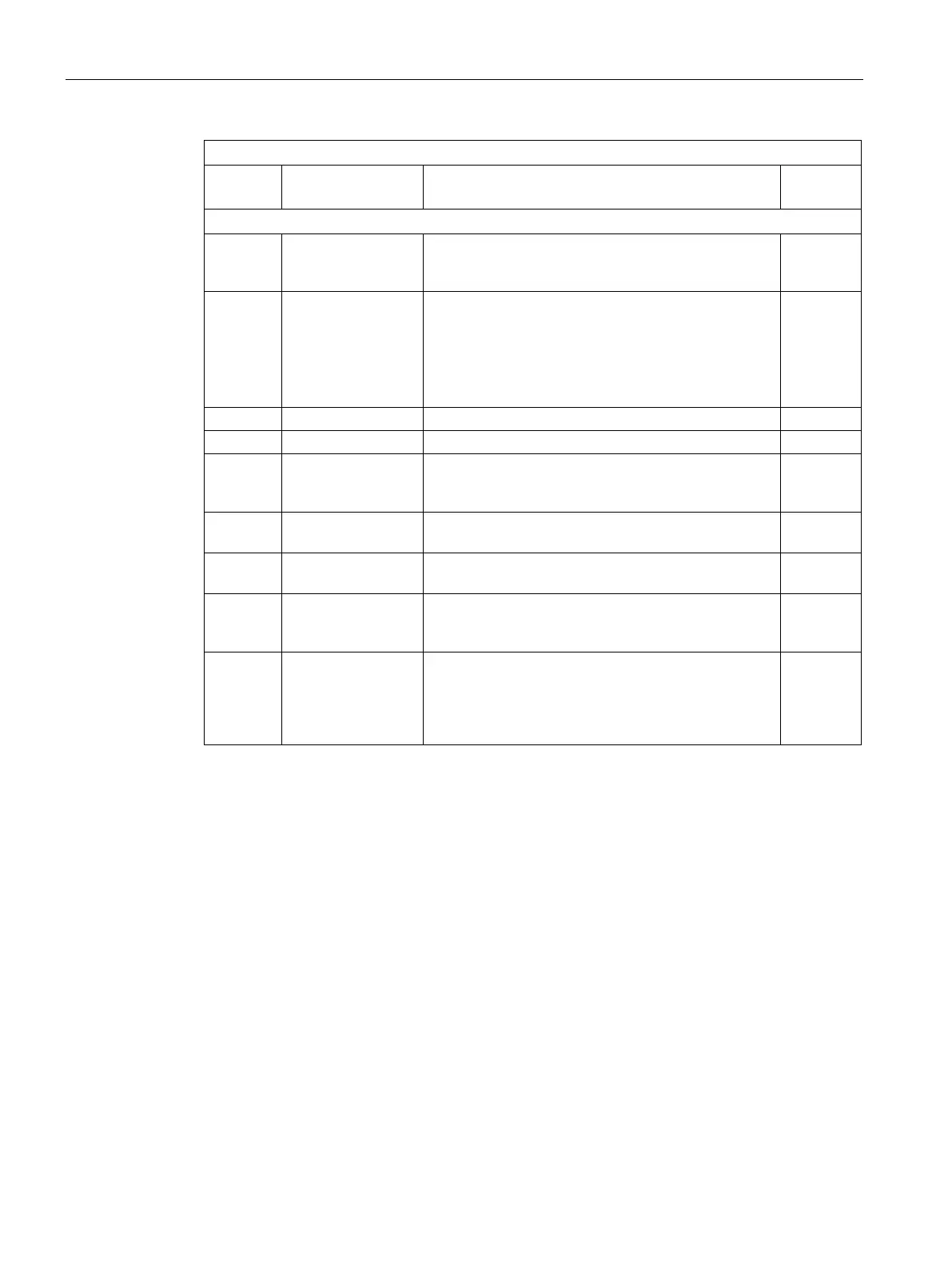
Configuration/Profile table
42 RP_SLOW Slow speed for the RP seek operation: Maximum
speed from which the motor can instantly go to a stop
DInt/Real
46 SS_SPEED Start/Stop Speed. (4 bytes):
The starting speed is the maximum speed to which
the motor can instantly go from a stop and the maxi-
mum speed from which the motor can instantly go to a
stop. Operation below this speed is allowed, but the
acceleration and deceleration times do not apply.
DInt/Real
Maximum operating speed of the motor (4 bytes)
Jog speed (4 bytes): MAX_SPEED or less (4 bytes)
58 JOG_INCREMENT Jog increment value: The distance (or number of
pulses) to move in response to a single jog pulse
DInt/Real
62 ACCEL_TIME Time required to accelerate from minimum to maxi-
mum speed in msec (4 bytes)
DInt
66 DECEL_TIME Time required to decelerate from maximum to mini-
mum speed in msec (4 bytes)
DInt
70 BKLSH_COMP Backlash compensation: The distance used to com-
pensate for the system backlash on a direction
DInt/Real
74 JERK_TIME Time during which jerk compensation is applied to the
beginning and ending portions of an accelera-
tion/deceleration curve (S-curve). Specifying a value
of 0 disables jerk compensation. The jerk time is given
in milliseconds (Range: 0 ms to 32000 ms. (4 bytes)
DInt

 Loading...
Loading...










