Open loop motion control
12.10 Advanced topics
S7-200 SMART
558 System Manual, 09/2015, A5E03822230-AC
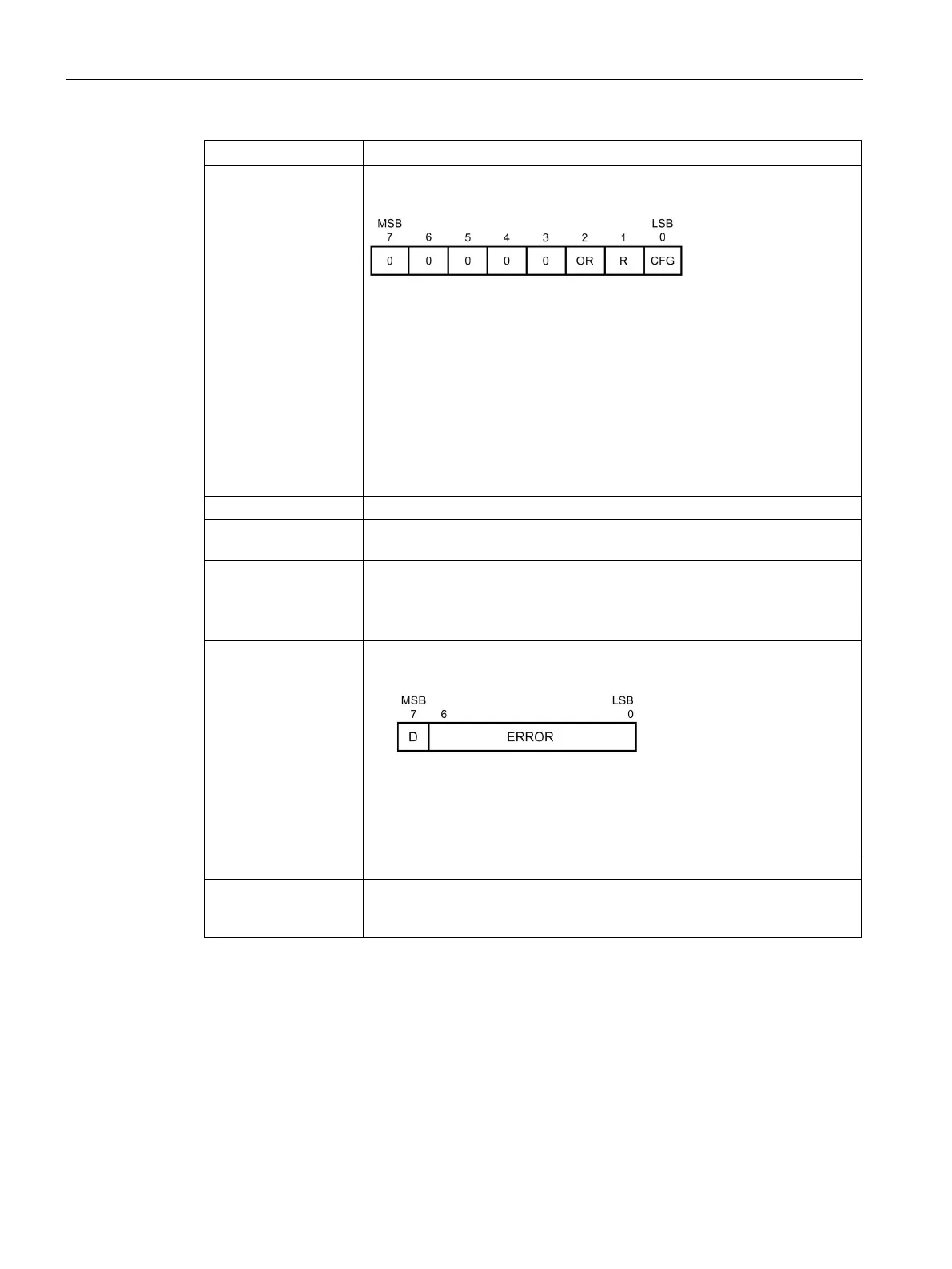
SMB623 Axis 0 Instantaneous status: Reflects the status of the configuration and
rotation direction status
• OR (Target speed out of range):
– 0 = In range
– 1 = Out of range
• R (Direction of rotation):
– 0 = Positive rotation
– 1 = Negative rotation
• CFG (Module configured):
– 0 = Not configured
– 1 = Configured
Axis 0: CUR_PF is a byte that indicates the profile currently being executed.
SMB625 Axis 0: CUR_STP is a byte that indicates the step currently being executed
SMD626 Axis 0: CUR_POS is a double-word value that indicates the current position
SMD630 Axis 0: CUR_SPD is a double-word value that indicates the current speed of
the Axis of Motion.
SMB634 Axis 0: Result of the instruction. Error conditions above 127 are generated
by the instruction subroutines created by the Motion wizard.
• D (Done bit):
– 0= Operation in progress
– 1= Operation complete (set by the Axis of Motion during initialization)
• ERROR: (See "Motion instruction error codes" (Page 545) list.)
SMD646 Axis 0: Pointer to the V memory location of the configuration/profile table. A
pointer value to an area other than V memory is not valid. The Axis of Mo-
tion monitors this location until it receives a non-zero pointer value.

 Loading...
Loading...










