Controller area network (bxCAN) UM0306
298/519
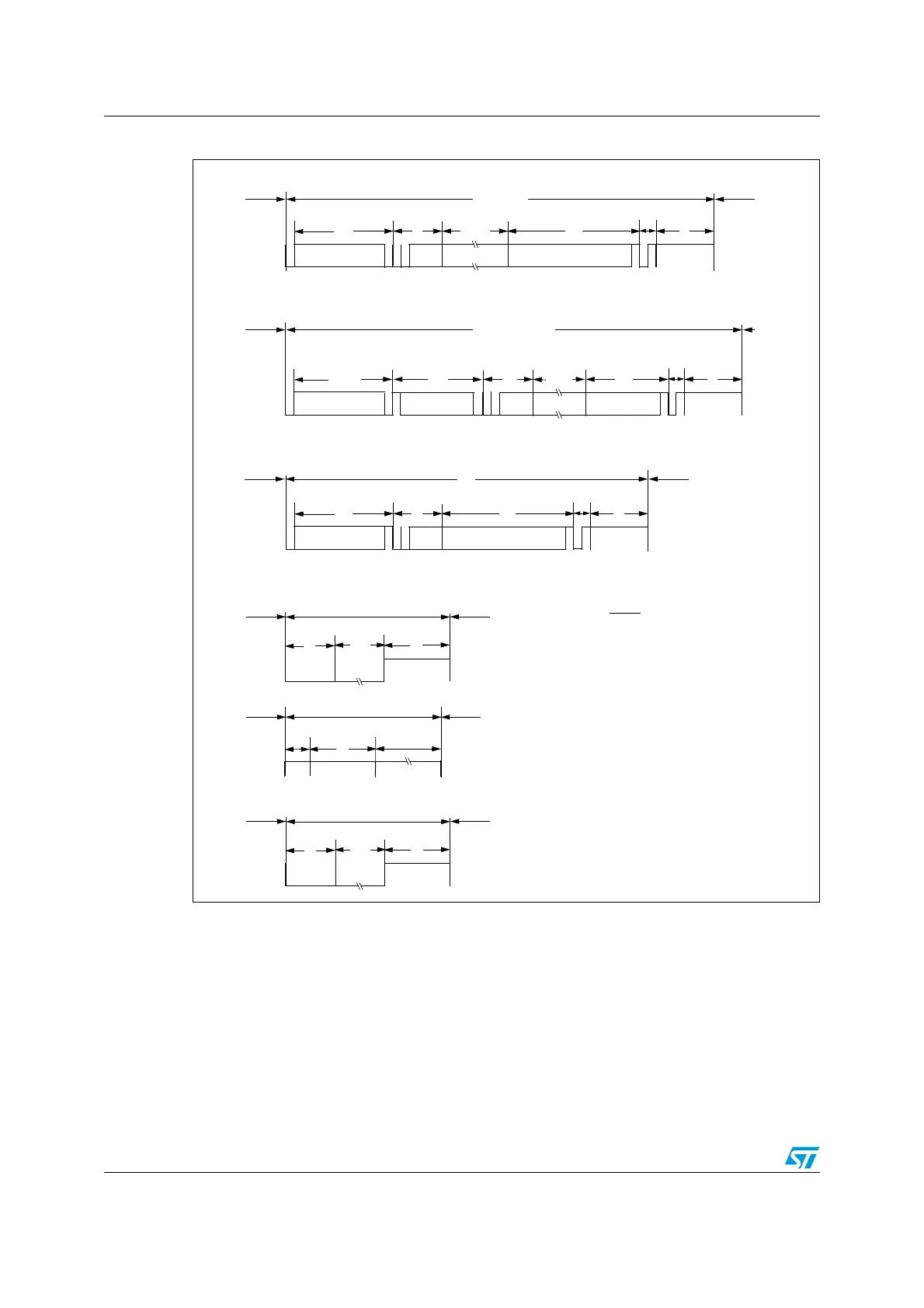
Figure 131. CAN frames
14.6 Interrupts
Four interrupt vectors are dedicated to bxCAN. Each interrupt source can be independently
enabled or disabled by means of the CAN Interrupt Enable Register (CAN_IER).
Data Frame or
Remote Frame
Data Field
8 * N
Ctrl Field
6
Arbitration Field
12
CRC Field
16
Ack Field
7
SOF
ID
DLC
CRC
Data Frame (Standard identifier)
44 + 8 * N
Arbitration Field
12
RTR
IDE
r0
SOF
ID
DLC
Remote Frame
44
CRC Field
16 7
CRC
Ctrl Field
6
Overload
Overload Frame
Error
6
Error Delimiter
8
Error Frame
Flag Echo
≤ 6
Bus Idle
Inter-Frame Space
Suspend
8
Intermission
3
Transmission
ACK
ACK
2
2
Inter-Frame Space
or Overload Frame
Inter-Frame Space
Inter-Frame Space
or Overload Frame
Inter-Frame Space
Inter-Frame Space
or Overload Frame
Notes:
• 0 <= N <= 8
• SOF = Start Of Frame
• ID = Identifier
• RTR = Remote Transmission Request
• IDE = Identifier Extension Bit
• r0 = Reserved Bit
• DLC = Data Length Code
• CRC = Cyclic Redundancy Code
• Error flag: 6 dominant bits if node is error
active else 6 recessive bits.
• Suspend transmission: applies to error
passive nodes only.
• EOF = End of Frame
• ACK = Acknowledge bit
• Ctrl = Control
Data Frame or
Remote Frame
Any Frame
Inter-Frame Space
or Error Frame
End Of Frame or
Error Delimiter or
Overload Delimiter
Ack Field
EOF
RTR
IDE
r0
EOF
Data Field
8 * N
Ctrl Field
612
CRC Field
16
Ack Field
7
SOF
ID
DLC
CRC
Data Frame (Extended Identifier)
64 + 8 * N
ACK
2
Inter-Frame Space
or Overload Frame
Inter-Frame Space
SRR
IDE
EOF
RTR
r1
r0
Std Arbitr. Field
20
Ext Arbitr. Field
6
Overload
8
≤ 6
Overload
Flag
Echo
Delimiter
Flag
 Loading...
Loading...





