Rockwell Automation Publication 2198-UM004A-EN-P - October 2019 237
Modes of Operation Chapter 10
I/O Mode - Home
The Kinetix 5100 drive receives home commands from the controller, then
commands the motor to home position per the homing method.
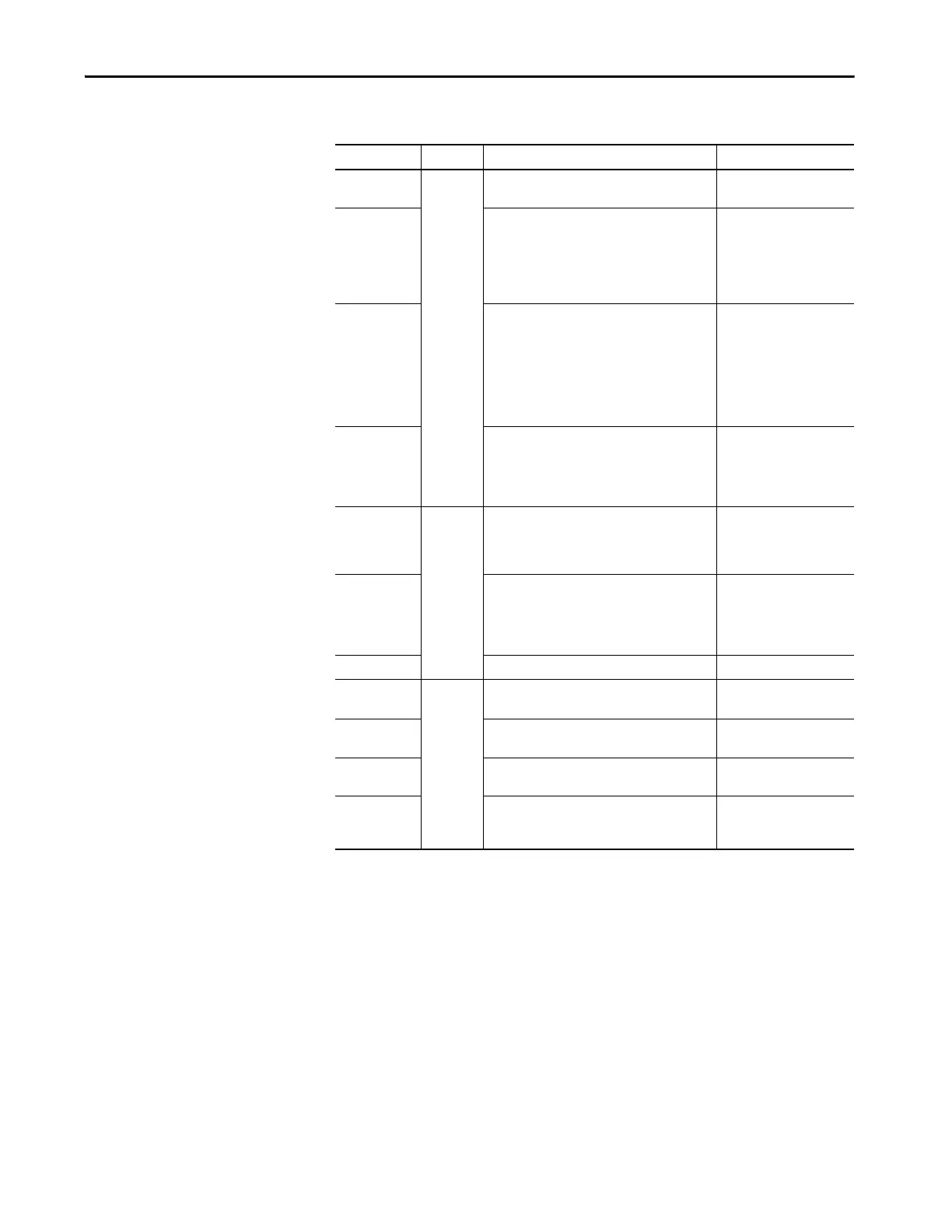
Table 91 - Position Mode Data Description
Name Data Type Description Semantics of Values
Operation mode
setting
SINT Indicates what output assembly parameters have
effect when ‘Start Motion’ has a 0-to-1 transition.
Must be 1 - position mode
Selection Move type • -128…+1: Reserved
•2: Positioning/move type
•3…9: Reserved
• 10: Index positioning/
move method
• 11…127: Reserved
Cyclic move type Position command selection, when selection is 2. • -128…+1: Reserved
• 0: Absolute positioning
• 1: Relative positioning
• 2: Incremental
positioning
• 3: High-speed position
capturing
•4…127: Reserved
Move method Movement directions when selection is 10. • -128…+1: Reserved
• 0: Rotary positive
•1: Rotary negative
• 2: Rotary shortest path
•3…127: Reserved
Interrupt BOOL When this movement is executed, it interrupts the
previous movement.
• 0: Does not interrupt
previous movement
• 1: Can interrupt previous
movement
Overlap Permits overlapping of the next movement. • 0: Does not permit
overlapping of the next
movement
• 1: Permits overlapping of
the next movement
Capture source Captures move source. 0 = DI7, 1 = DI8.
Speed reference DINT For a rotary motor, the speed reference is 0.1 rpm/
sec.
—
Acceleration
reference
For a rotary motor, the acceleration reference is 0.1
rpm/sec.
—
Deceleration
reference
For a rotary motor, the deceleration reference is 0.1
rpm/sec.
—
Position
reference
The relationship between user unit and motor
encoder counts is defined by position factor
numerator/denominator.
—

 Loading...
Loading...




