Rockwell Automation Publication 2198-UM004A-EN-P - October 2019 261
Motion Control in PR Mode Chapter 11
same position after homing with the same condition regardless of the location of
the starting point.
If you set the motor to not look for the Z pulse, the servo motor first operates at
high speed (first speed setting) and then decelerates to a stop once rising-edge
limit signal is triggered. Then the motor changes to low speed (second speed
setting) to look for rising-edge signal. Once it finds the rising-edge signal, the
motor decelerates to a stop, completing the homing.
Referencing the Rising-edge Signal of the Home Sensor (ORG)
This method uses the rising-edge of the home sensor (ORG) signal as the
reference point. You have the option of using the Z pulse as the reference point of
the origin when the home sensor detects the signal.
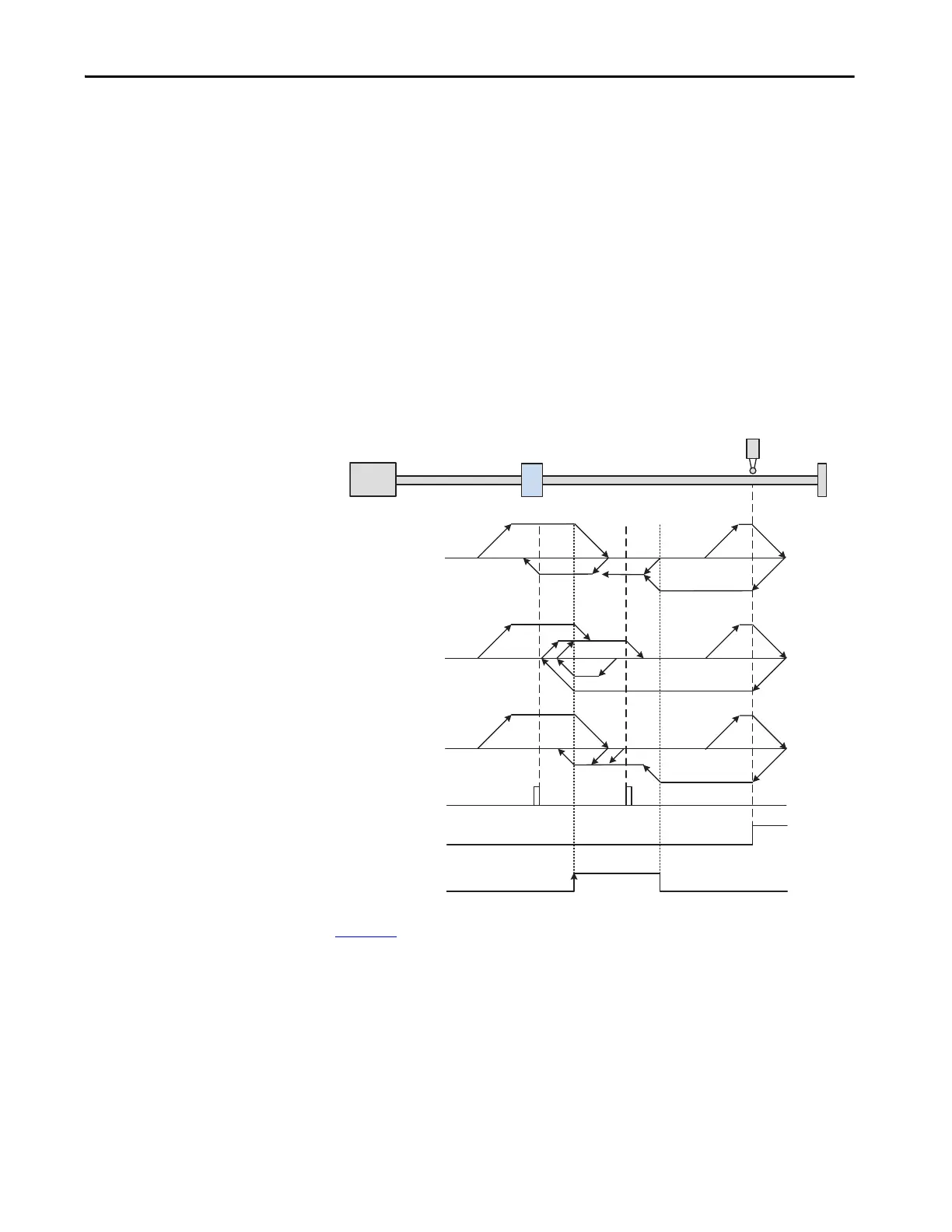
Figure 90 - ORG Signal (rising edge) as Reference Point
Figure 90 shows an example of reversing to look for the Z pulse. If the home
sensor signal for the start position is un-triggered (low, Start point 1), the servo
motor operates at high speed (first speed setting) until it reaches the rising-edge
of ORG signal. Then it decelerates, switching to low speed (second speed
setting) and reverses to look for the Z pulse. When the motor finds the Z pulse, it
decelerates to a stop, completing the homing.
If the ORG signal at the start point is un-triggered and the current position is
relatively closer to the limit switch (Start point 2), then the servo motor operates
at high speed (first speed setting). You can choose whether to show an error or
reverse the running direction when it reaches the limit switch. If you choose to
Motor
Z pulse
Start point 1
Limit signal
Reverse to Z
End
Start point 1
Go forward to
Z
End
Do not look
for Z
Start point 1
End
ORG signal
Limit
Start point 3
Start point 2
Start point 2
Start point 3
Start point 3
Start point 2

 Loading...
Loading...




