172 Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
Chapter 9 Tuning
Autotuning Configuration Parameters
Parameters ID264 (P2.105) AutoTuningBandwidth and ID265 (P2.106) Auto
TuningOvershoot can be used to adjust the responsiveness and rigidity,
respectively, in autotuning mode
ID264 (P2.105) - AutoTuningBandwidth Parameter
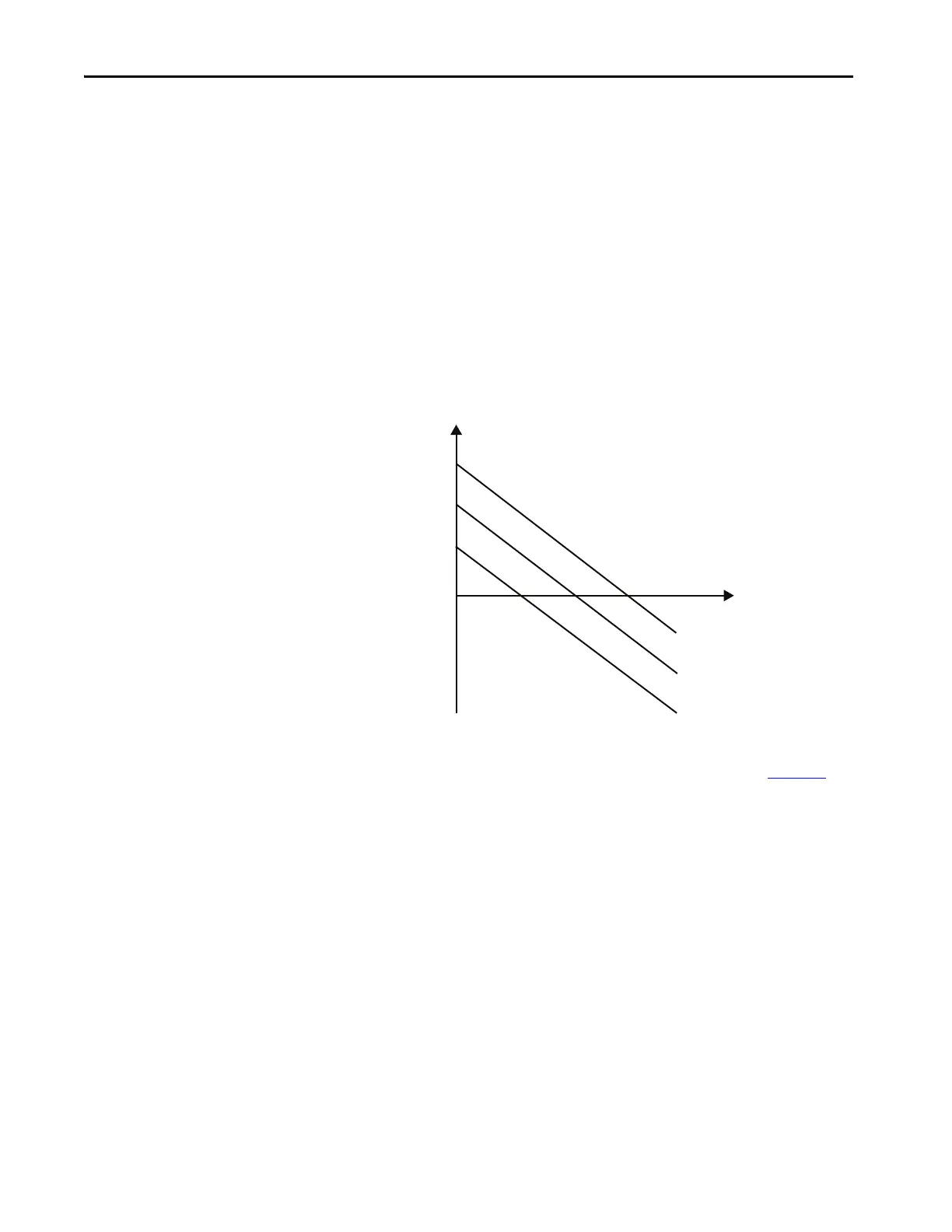
This parameter is used to adjust the bandwidth when autotuning. If the value is
larger, the bandwidth after autotuning is higher, but the bandwidth margin may
be insufficient, causing machine jitter. If the value is smaller, the bandwidth after
autotuning is lower, but the response is slower.
Figure 71 - AutoTuningBandwidth Parameter Graph
For parameter descriptions and data, see the Knowledgebase article 1090034
Kinetix 5100 Servo Drive Parameter Data and Fault Codes.
Value (dB)
Frequency
(Hz)
Bandwidth
Higher
Bandwidth
Moderate
Bandwidth
Lower
ID264 (P2.105)>11
ID264 (P2.105)=11
ID264 (P2.105)<11

 Loading...
Loading...




