270 Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
Chapter 11 Motion Control in PR Mode
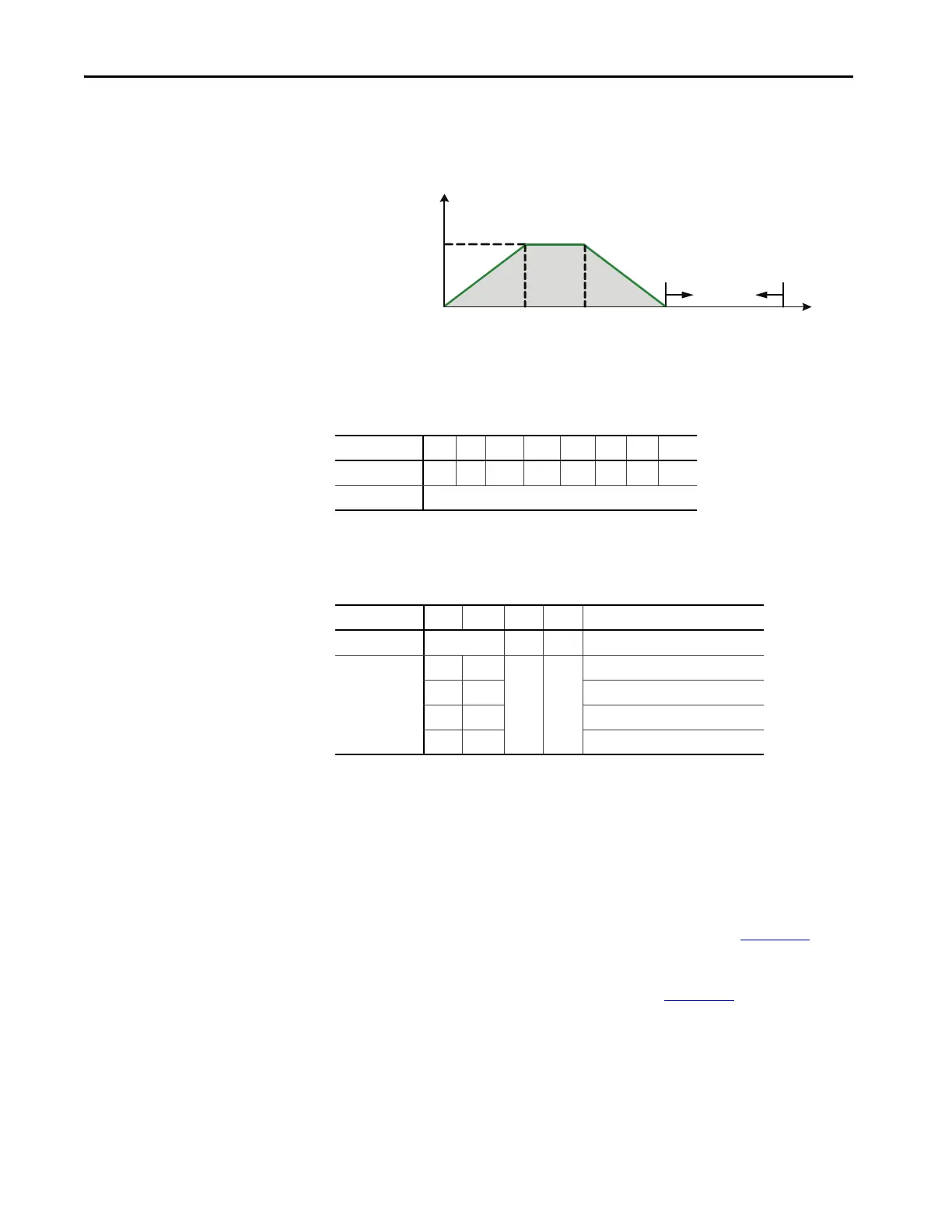
Figure 100 - Parameters for PR Mode Position Settings
Below are the functions of each bit when a position command is applied.
Note:
1. OPT: option
Position Command Types
There are four types of position commands for the PR mode. You can choose the
position command according to the application requirements. The functions of
each type are described in the examples below. The condition in these examples is
that a position command is still being executed and another type of command is
inserted. To see how the position commands are combined, see Figure 101
.
1. Absolute position command (ABS): when executed, the target position
value equals the absolute command value. In Figure 101
, an ABS
command with the value of 60000 PUU is inserted in the previous PR
command with setting target position of 60000 PUU on the coordinate
axis.
PR parameters D C B A U Z Y X
Command type - - DLY SPD DEC ACC OPT 2 or 3
Data content Target position [PUU]
BIT 3 2 1 0 Description
Command type CMD OVLP INS -
Data content 00
--
ABS (absolute positioning)
0 1 REL (relative positioning)
1 0 INC (incremental positioning)
1 1 CAP (high-speed position capturing)
Target speed
Acceleration time
Time
Spee d
Delay time
Deceleration time
Po sition
command

 Loading...
Loading...




