152 Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
Chapter 7 Configure the Drive with KNX5100C Software
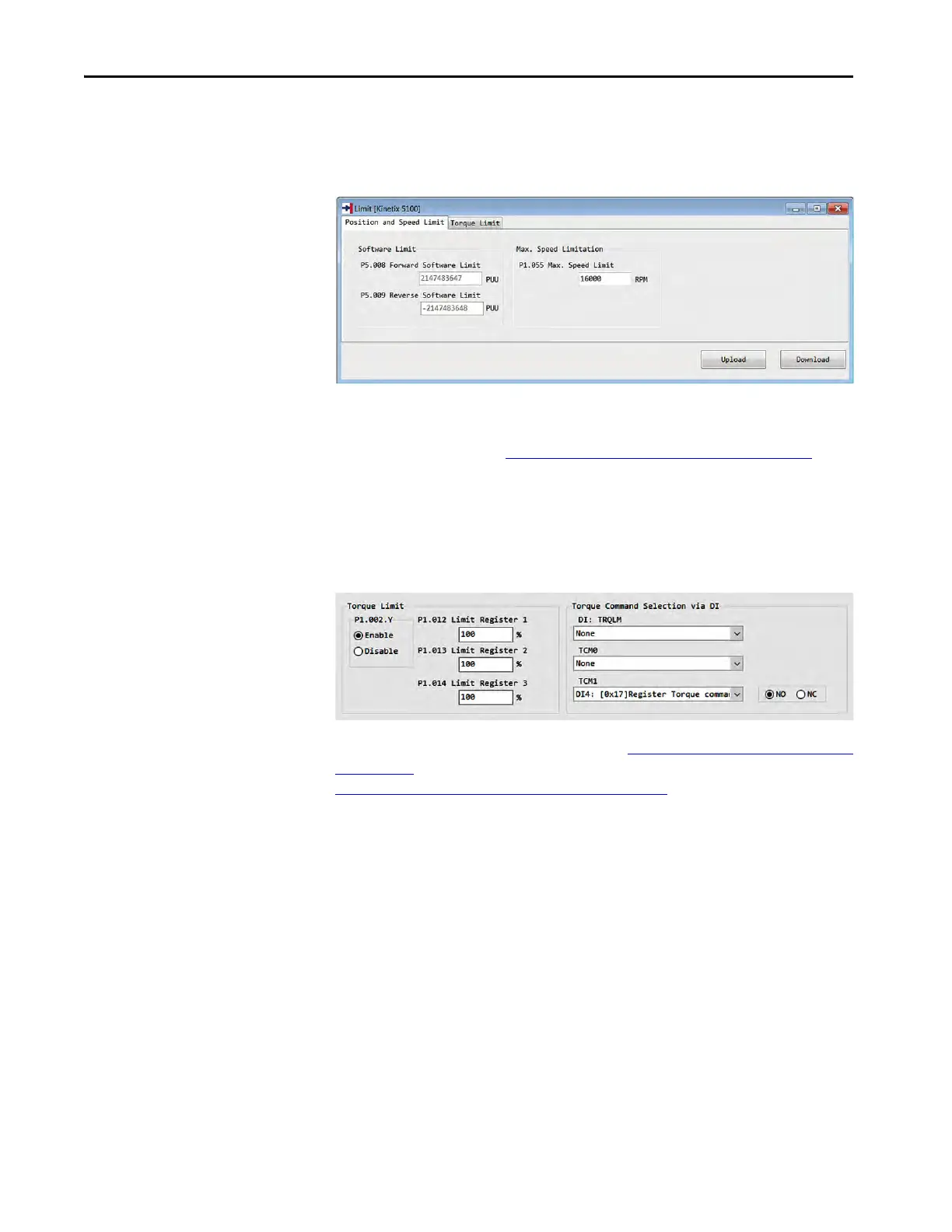
Position and Speed Limit
On the Position and Speed Limit tab, you can forward and reverse software limits
and the maximum speed limits by changing the values of the related parameters.
Click Download to download any changed parameters to the servo drive.
For more information, see Speed and Torque Limit Functions
on page 242.
Torque Limit
On the Torque Limit tab, you can enable or disable torque limits and set torque
limit values. You can also select torque command by changing digital input
settings.
For more information on the torque limit, see Speed and Torque Limit Functions
on page 242. For more information on digital input function descriptions, see
Description of Digital Input Functions
on page 405.
Configure Analog I/O
The motor operation status of motor can be displayed in the manner of analog
voltage, such as speed and current. This servo drive provides two output channels
for this purpose, MON1 and MON2.

 Loading...
Loading...




