Rockwell Automation Publication 2198-UM004A-EN-P - October 2019 247
Chapter 11
Motion Control in PR Mode
This chapter provides information about how to use the PR mode. In this mode,
motion commands are generated based on the internal register commands of the
servo drive. Various motion commands are available, including Homing, Speed,
Position, Jump, Write, Index Position and Arithmetic operation. This chapter
contains detailed description of each motion command.
Detailed Operation in PR
Mode
In PR mode, the internal registers of the servo drive generate motion commands.
Except for the basic arithmetic operation commands, all settings are saved in the
parameter file of the servo drive. Thus, changing parameter values will change the
PR commands simultaneously. The drive provides 100 PR commands, which let
you configure the following:
•homing method
• position command
• speed command
•jump command
• write command
• index positioning command
• arithmetic operation commands.
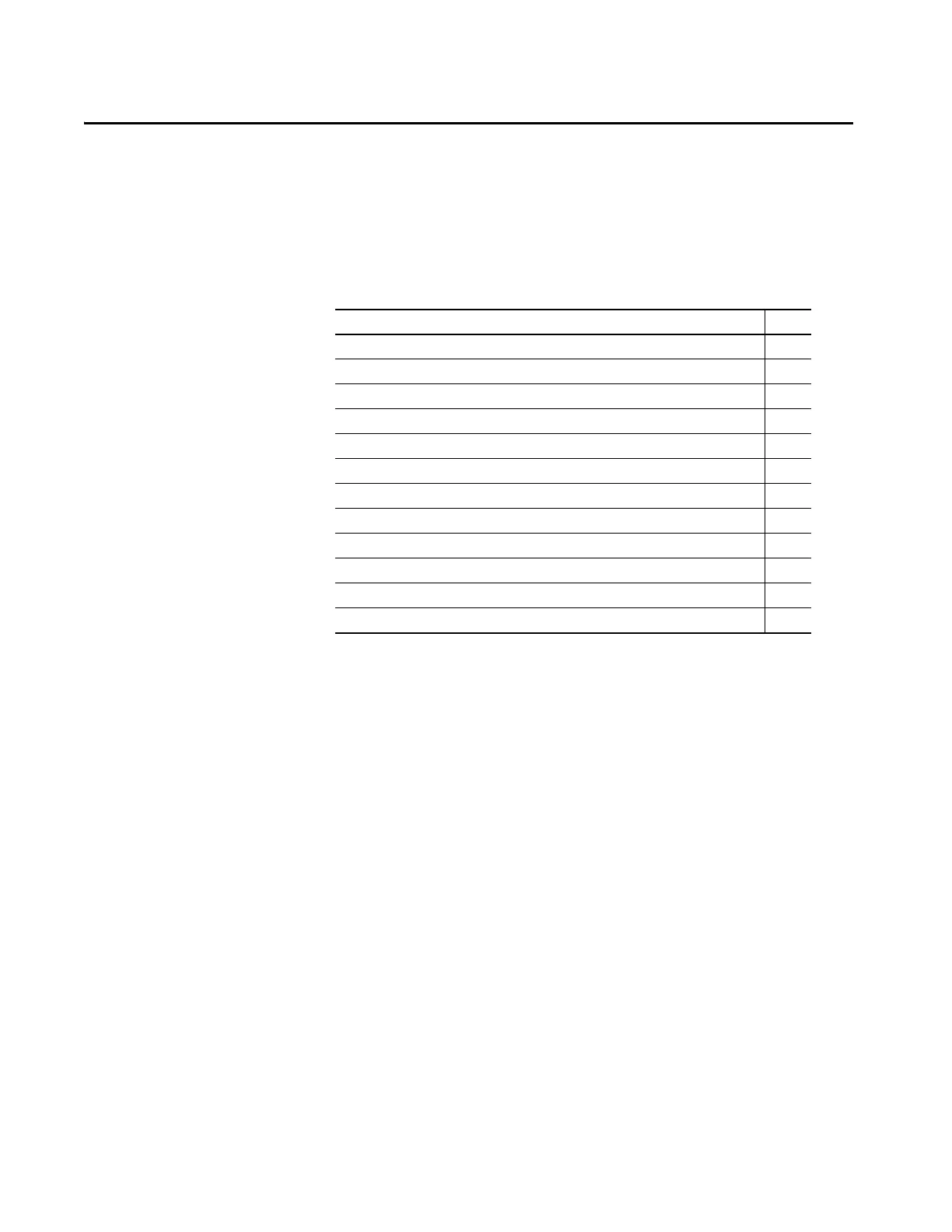
Topic Page
Detailed Operation in PR Mode 247
Homing 256
Speed Control Command 267
Position Control Command 269
Jump Command 272
Write Command 273
Index Position Command 275
Arithmetic Operations Commands 278
PR Mode Setup in KNX5100C Software 279
Display of PR Procedure in KNX5100C Software 288
Trigger Method for PR Commands 294
PR Execution Process 300

 Loading...
Loading...




