260 Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
Chapter 11 Motion Control in PR Mode
Operation of Homing Types
The following describes the homing methods supported by the drive. They can
be categorized into six types based on their reference points.
Referencing the Limit
This homing method uses the positive or negative limit as the reference point.
When the limit is detected, you can choose to look for the Z pulse and use it as
the homing reference point. Changing the starting position does not change the
searching result. The drive always looks for the setting reference point to
correctly reset the coordinates.
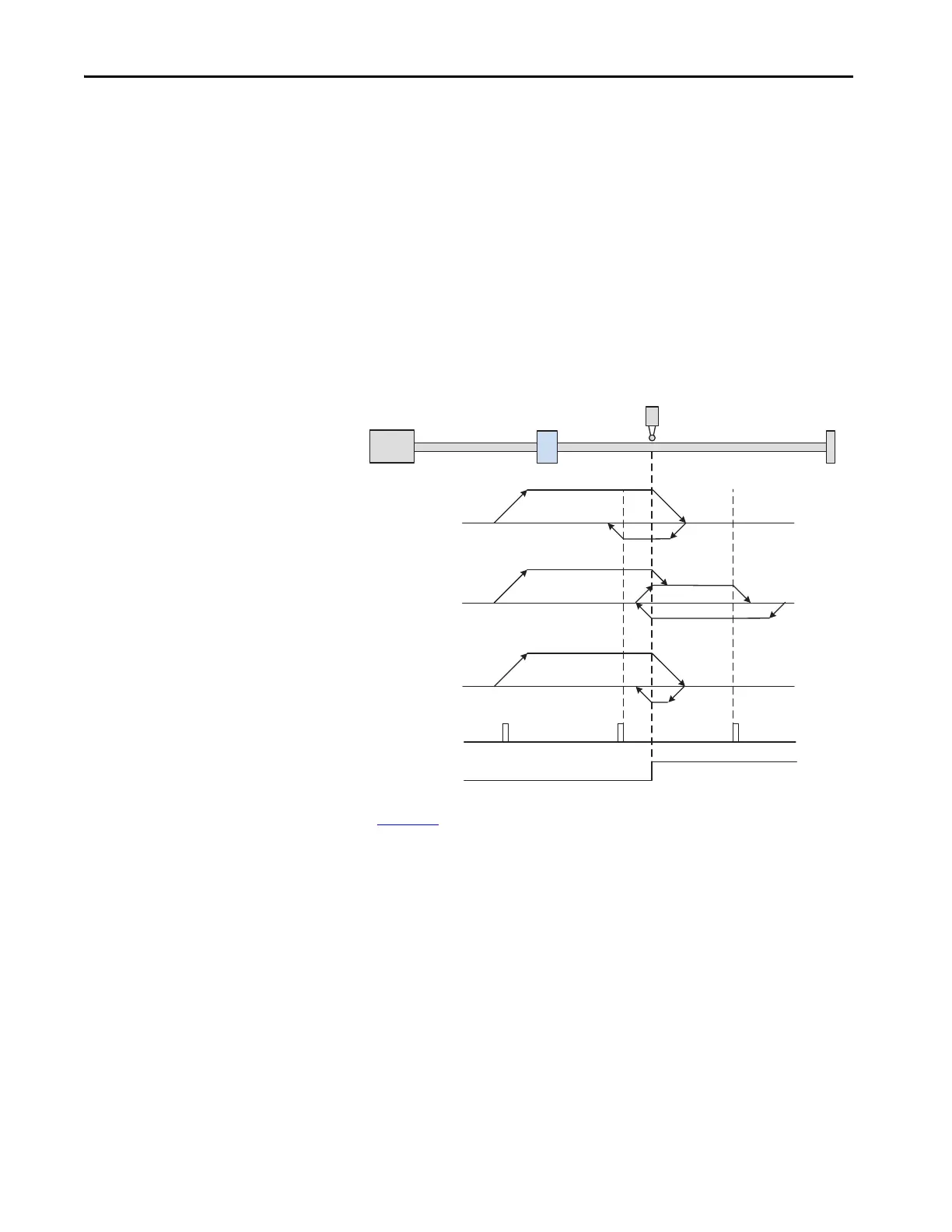
Figure 89 - Positive or Negative Limit as Reference Point
In the Figure 89 example (looking for the Z pulse), the servo motor operates at
high speed (first speed value) and then decelerates once it reaches the limit
(rising-edge triggers the signal). Then the motor switches to low speed (second
speed value) to look for the Z pulse. When the motor finds the Z pulse, it
decelerates and stops, completing the homing procedure.
If you set the motor to look for the Z pulse and the limit signal remains un-
triggered (low, Start point 1), the servo motor operates at high speed (first speed
setting) and then decelerates once it reaches the limit (rising-edge triggers the
signal). Then the motor switches to low speed (second speed setting) to look for
the Z pulse. When the motor finds the Z pulse, it decelerates and stops,
completing the homing procedure. If the setting is to look for the Z pulse and the
limit signal is triggered (high, Start point 2), the servo motor returns to look for
the rising-edge trigger signal at low speed (second speed setting). Once it is
found, the servo motor starts to look for the Z pulse and decelerates to stop when
it finds the Z pulse, completing the homing. In conclusion, the origin is at the
Motor
Z pulse
Start point
Limit signal
Reverse to Z
End
Start point 1
Go fo rward to
Z
End
Start point 2
Do not look
for Z
Start point
End
Limit

 Loading...
Loading...




