442703/B
303
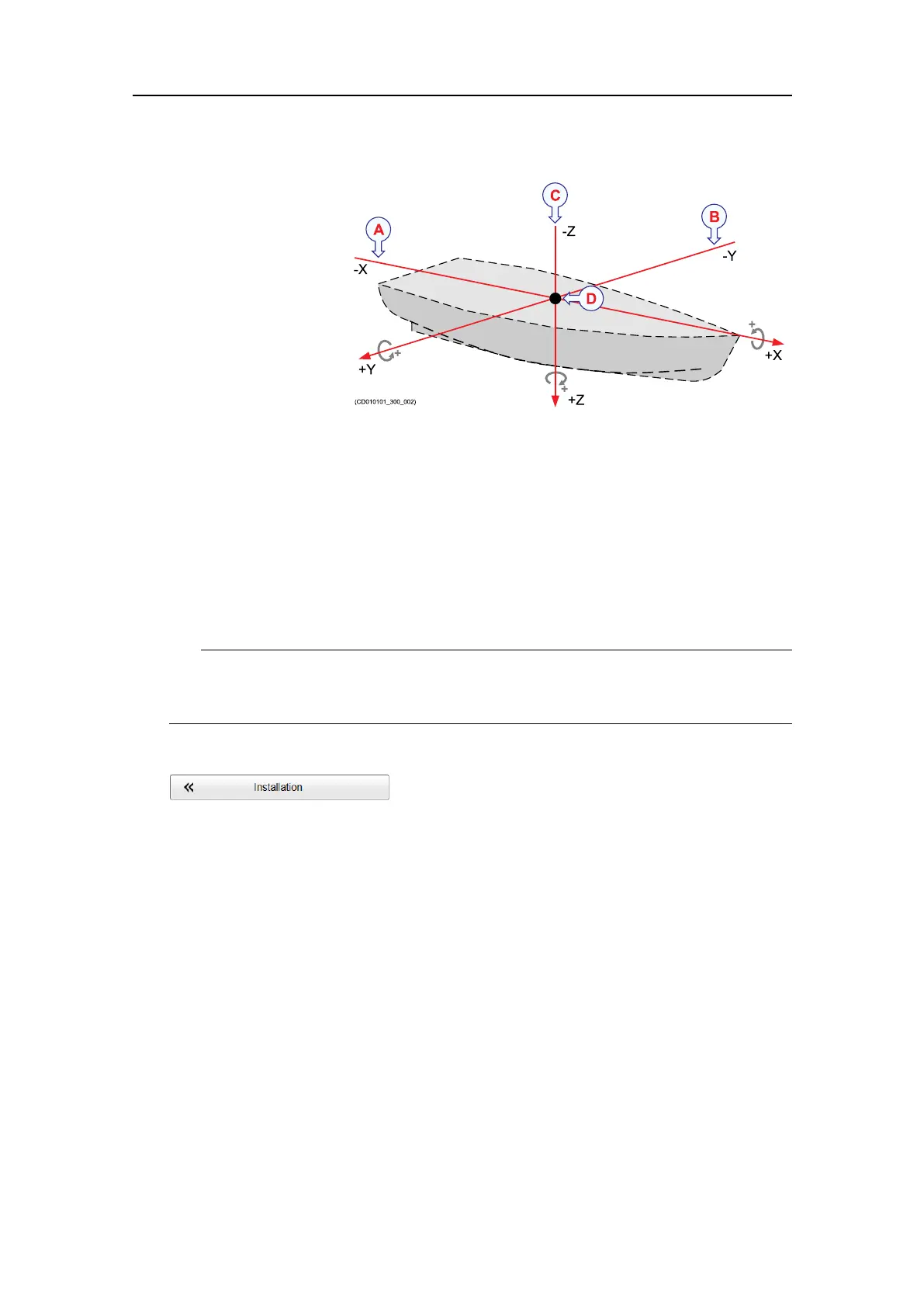
ARotationaround
thex-axis:Inthe
positivehorizontal
direction(forward),
apositiverotation
isclockwise.
BRotationaround
they-axis:In
thepositive
horizontaldirection
(starboard),a
positiverotation
isclockwise.
CRotationaroundthez-axis:Inthepositiveverticaldirection(down),apositive
rotationisclockwise.
DReferencepoint(ShipOrigin)
Procedure
1Estimatethealignmentanglefromthebow(vessel’scentreline)tothe0°reference
markforthebuilt-inmotionsensor.
Tip
Theanglebetweeneachmountingboltcanbeusedasanaid.With24bolts,there
are15degreesbetweeneachbolt.
2OntheSetupmenu,selectInstallation.
ObservethattheInstallationdialogboxopens.Thisdialogboxcontainsanumber
ofpagesselectedfromthemenuontheleftside.
3OntheleftsideoftheInstallationdialogbox,selectthesmallwhitetrianglenextto
InstallationParameters.
Observethatamenuopenswithaccesstoalltheindividualpages.
4SelectMRUtoopenthepage.
5InsertthealignmentoffsetangleasarotationaroundZ.
•Ifthe0°referencemarkforthebuilt-inmotionsensorpointstothestarboard
(right)sideofthevessel’scentreline(asshownintheillustration),insertthe
offsetasanumberbetween0and+180degrees.
•Ifthe0°referencemarkpointstotheport(left)sideofthevessel’scentreline,
inserttheoffsetasanumberbetween0and–180degrees.
6Atthebottomofthepage,selectApplytosaveyoursettings.
7ContinueyourworkintheInstallationdialogbox,orselectOKtocloseit.
Settingtowork