6 Robot Settings
6.1 Tool Settings
6-3
HW1485509
HW1485509
6.1.2 Tool Name
A tool name can be from 0 to 16 alphanumeric characters in length,
including the minus ( – ) symbol. The Name must start with letters. The
same tool name can be used multiple times.
Fig. 6-1: Tool Name
6.1.3 Tool Mass Properties
Setting the correct Tool Mass Properties is critical to maintain system
performance. For the manipulators that have Power and Force Limiting
functions (e.g. MOTOMAN-HC10), the Tool Mass Properties weight,
center of gravity, and moment of inertia are used to calculate external
force. Therefore, these values must be entered precisely and tool setting
must be updated in any case where a tool and/or workpiece is changed.
For manipulators without Power and Force Limiting functions, the Tool
Mass Properties are used to optimize the manipulator’s motion
performance. Failure to set these properties may result in non-optimal
motion times.
If the active tool number is changed to a tool setting with one or multiple
Tool Mass Properties containing zero values, a notification will appear
directing the user to the {Tools} screen.
Fig. 6-2: Confirm Physical Settings for Active Tool
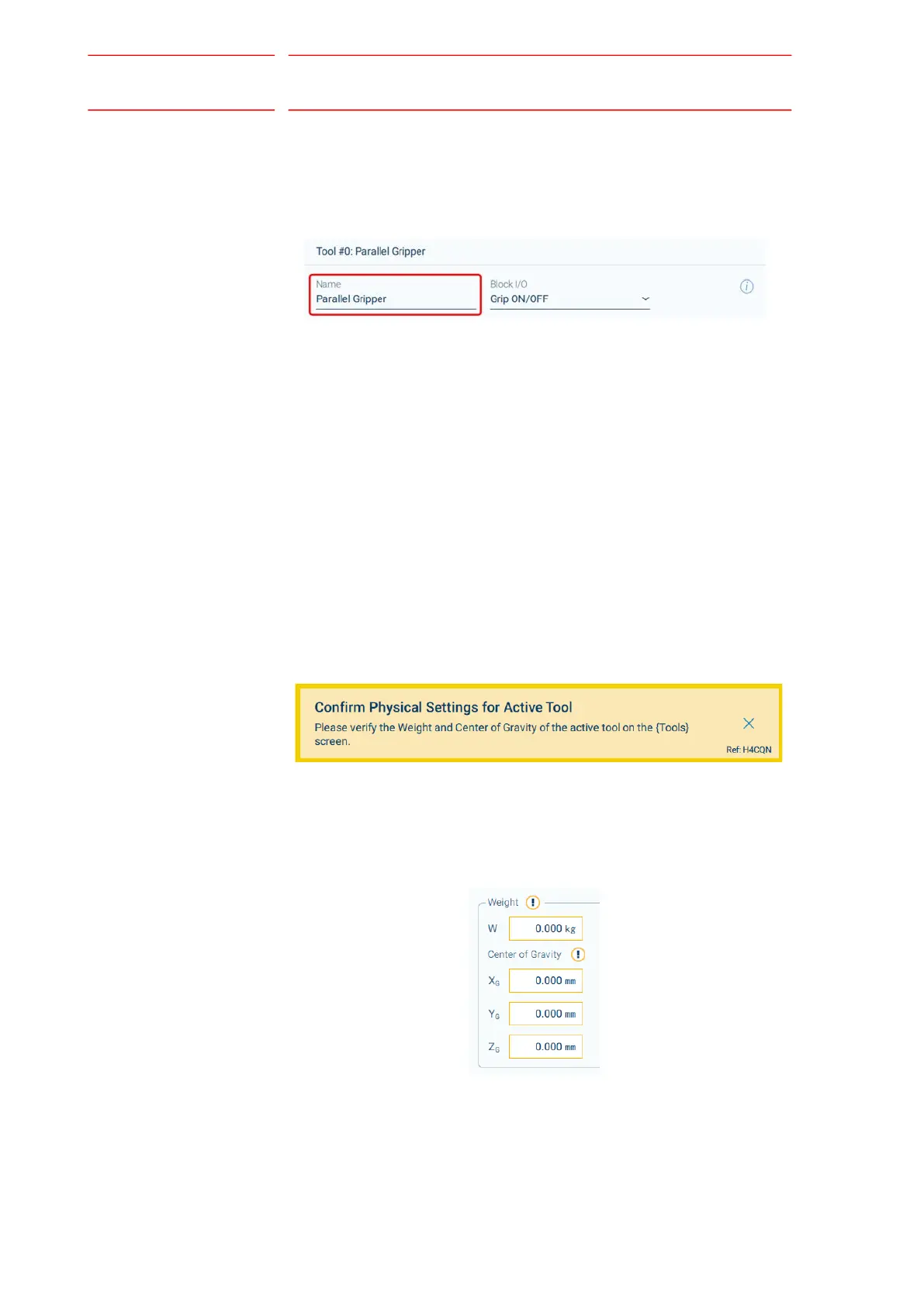
On the {Tools} screen, warning icons will appear near any setting(s) that
may affect the performance of the manipulator. These values should be
properly entered before finalizing the details of a job.
Fig. 6-3: Warnings for Critical Tool Settings Containing Zero Values