11 Safety Function
11.7 Setting Example of the Safety Functions
11-106
HW1485509
HW1485509
11.7 Setting Example of the Safety Functions
11.7.1 Single Safety Laser Scanner to Pause Robot Motion
This is an example how to setup a single safety laser scanner to pause
Robot motion with a Functional Safety Speed Limit when a person or
object is inside the safety laser scanner area.
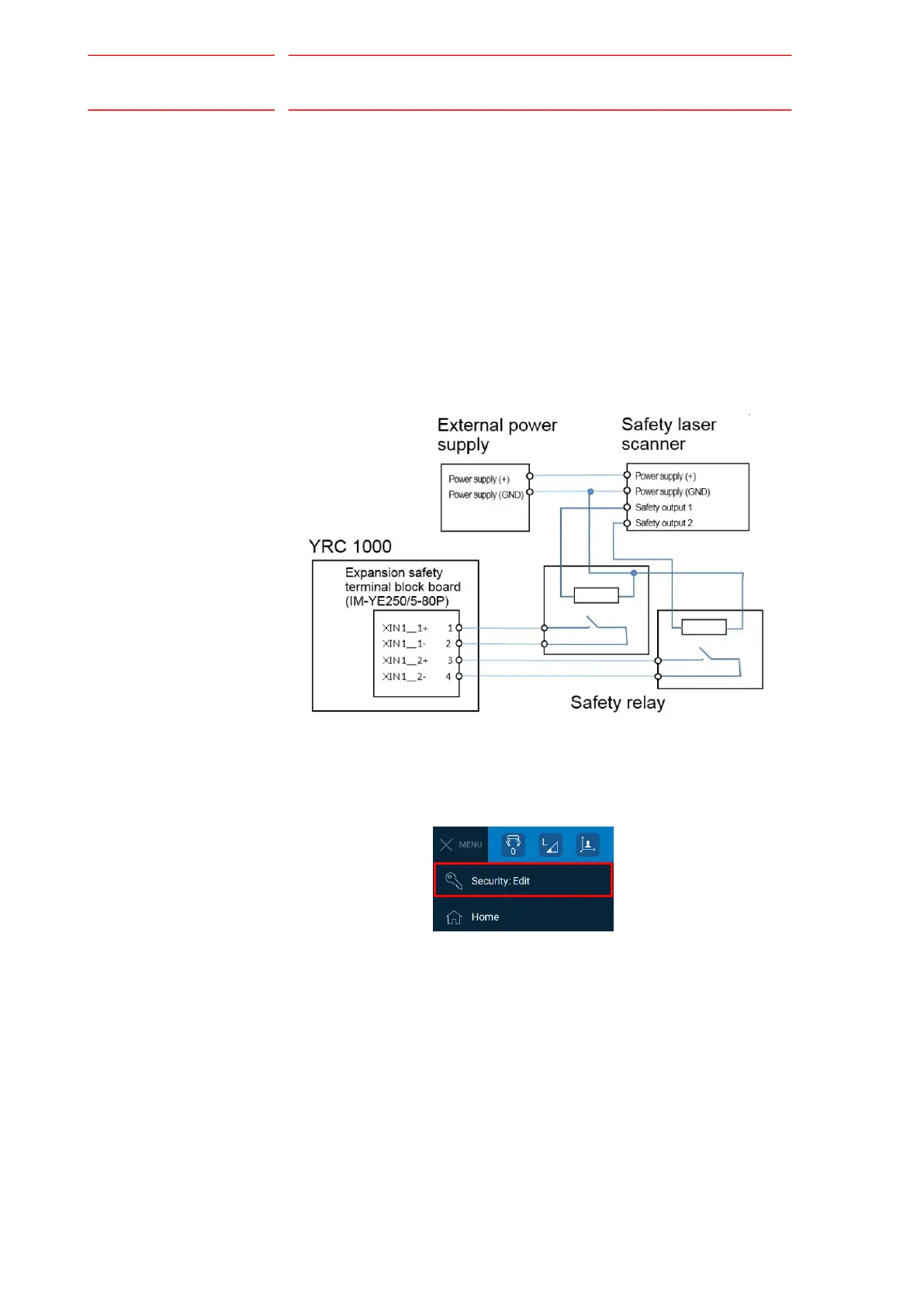
1. Connect the safety output of your safety laser scanner (it is written as
OSSD etc.) to a safety relay then take the two pairs of outputs from the
safety relay and properly connect them to the YRC Controller as per
your YRC Controller's instruction manual. For this example, we will be
using the Functional Safety Board Input #1 (FSBIN01). Note that
wiring diagrams for this input may refer to the two pairs as XIN1_1-/
XIN1_1+ and XIN1_2-/XIN1_2+.
2. Prior to performing any changes to safety related settings, you must be
in Safety level. Press the {MENU} button on the top left and open the
{Security} screen. Select SAFETY level, enter in the current safety
passcode, and press SAVE.