6 Robot Settings
6.3 User Frames
6-21
HW1485509
HW1485509
6.3 User Frames
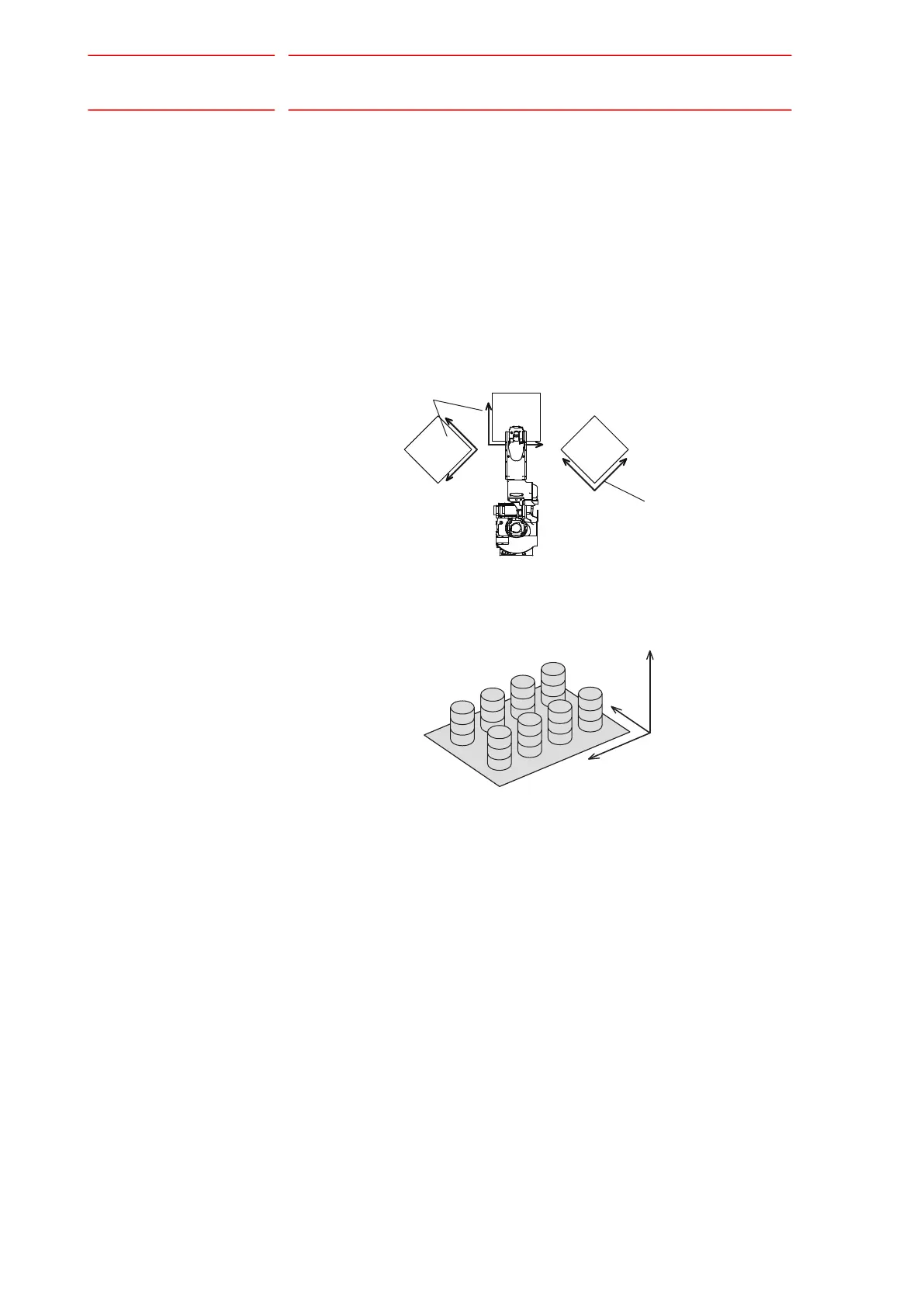
User Frame is a user-defined frame. Instead of specifying positions
relative to the World or Robot Frames, user can specify positions relative
to an object in their workcell such as a work surface, pallet, or conveyor.
The manipulator moves parallel to each axis of the user-defined frame.
The user defines the X, Y, and Z axes with the desired slopes and
positions available within the manipulator’s motion range.
6.3.1 Example Usage of User Frames
– When two or more fixtures are used, manual operation is simplified
by setting the user frames for each fixture.
– When performing arranging or stacking operations, the incremental
value for the parallel shift is easily set by setting the user frame on a
pallet.
– When the position of a pallet moves, all points relative to a pallet can
be moved simply by re-teaching the User Frame.
– When multiple pallets have the same part pattern, user can teach
points on one pallet and then switch them to another by changing
the User Frame.
User frame
Fixture
Fixture
Fixture
User frame