2 Manipulator Coordinate Systems and Operations
2.4 Coordinate Frames and Manipulator Jogging
2-25
HW1485509
HW1485509
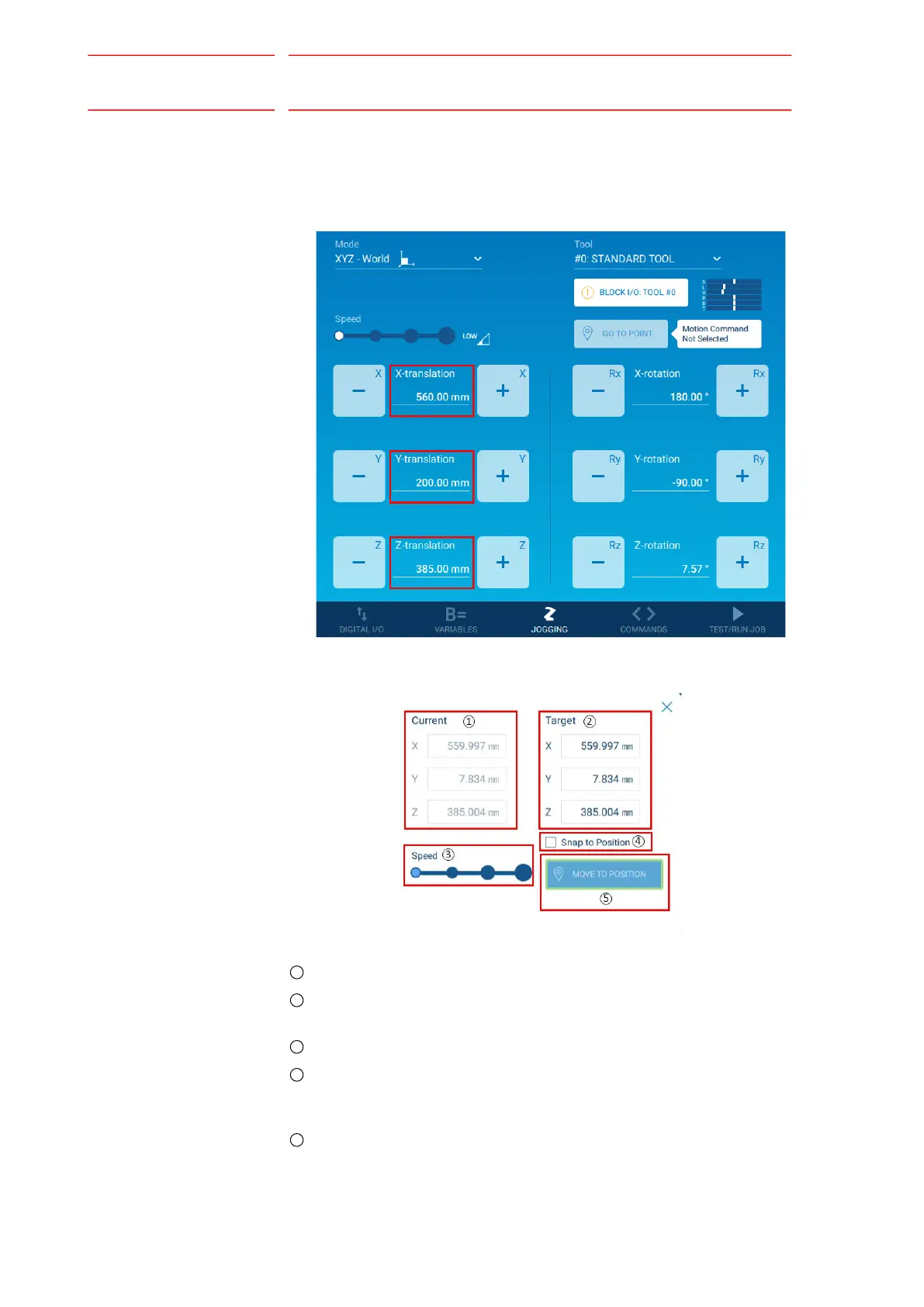
2.4.8.2 TCP Position Panel
The TCP Position Panel can be used whenever the Jogging Mode is set to
XYZ-World, XYZ-User, or XYZ-Tool. To open it, press any of the TCP XYZ
positions on the screen:
Fig. 2-21: Move to Position Panel (XYZ-World)
Fig. 2-22: TCP Position Panel
Current XYZ Position display.
Target XYZ Position display - The target X, Y, or Z position can be
entered into the text fields.
Jogging Speed Selection
Snap to Position - This “snaps” each coordinate to the nearest
10 mm increment. For example, the Y value is above (7.834 mm) it will
snap to 10.000 mm.
Move to Position button - This moves the robot towards the target X,
Y, or Z position. These buttons will have an orange boarder if any of the
Current X, Y, or Z Positions do not match the target X, Y, or Z Positions.