6 Robot Settings
6.6 Robot Configuration Positions
6-43
HW1485509
HW1485509
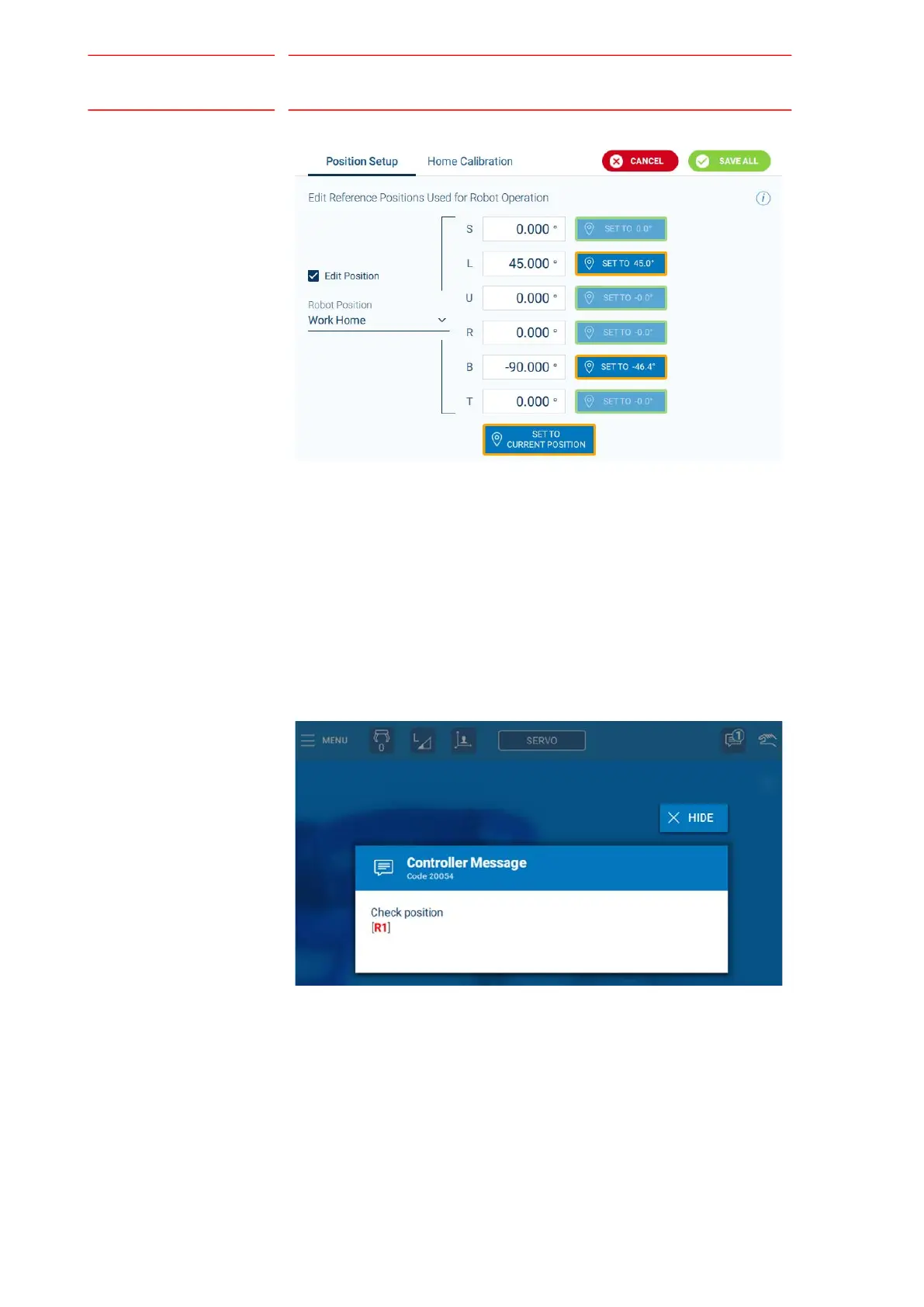
5. Uncheck {Edit Position} to exit “Edit” mode
6.6.4 Robot Position Confirm Procedure
Encoder alarms (e.g. 4107 or 4511) may occur if the manipulator stops
suddenly or collides during the operation, or if the manipulator is moved
while the YRC Controller power is OFF.
In the event of an encoder alarm, a message will appear prompting the
user to “check the position”. The ability to run a job and move to positions
other than the “Robot Position Confirm” target will be disabled when this
message is active.
Fig. 6-26: Robot Position Confirm Message