6 Robot Settings
6.5 Shock Detection Setting
6-35
HW1485509
HW1485509
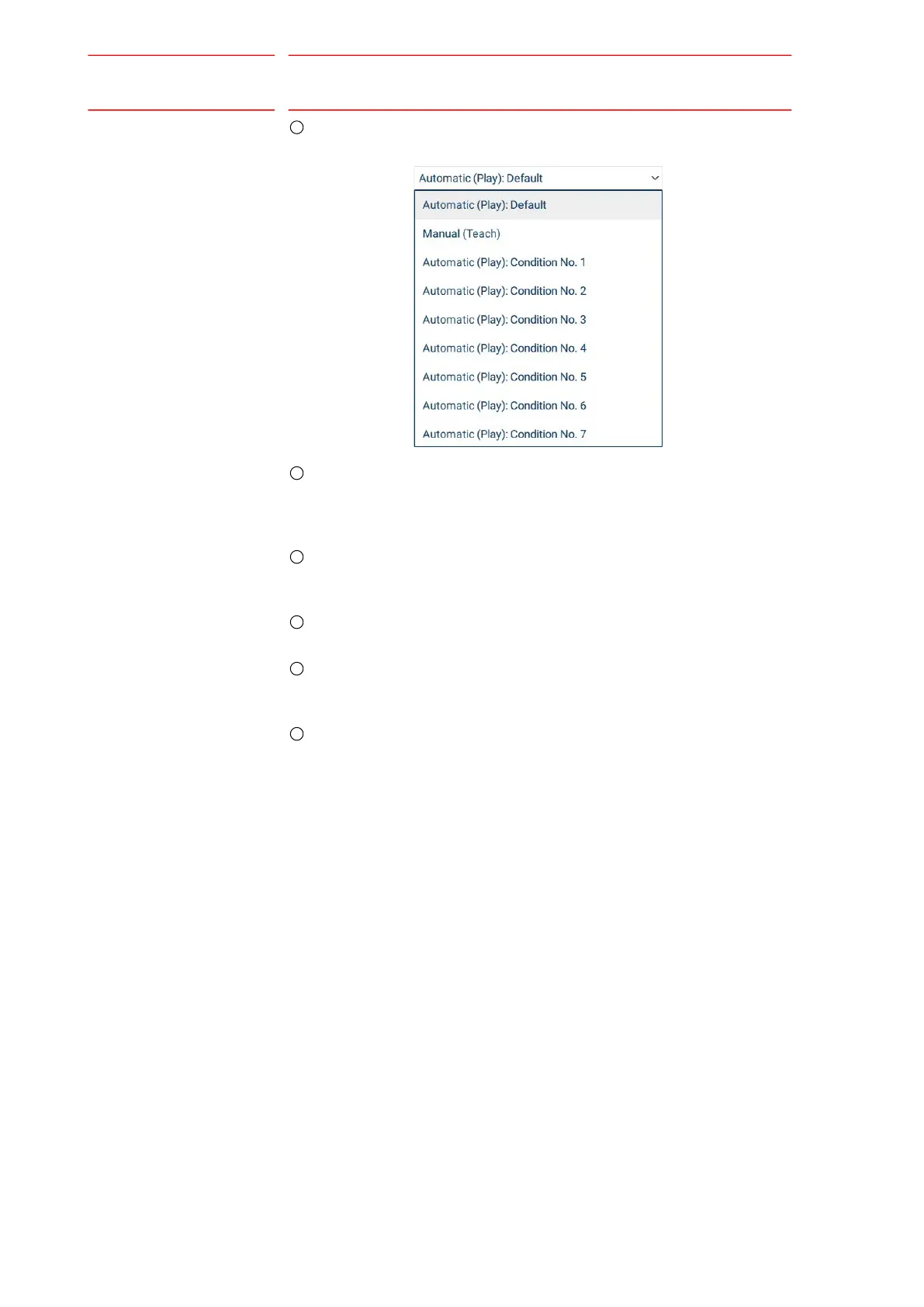
Shock Detection Setting
Use this to select Condition Number to configure.
Measured Max Torque
This will show the current Measured Max Torque and will update while
the Robot is running. These values can be cleared by pressing {Clear
Measured Max}.
Allowable Max Torque
This will display the Allowable Max Torque for the current Shock
Detection Setting.
Clear Measured Torque
This will reset the “Measured Max Torque” values.
Copy Measured to Allowable
This will copy the current “Measured Max Torque” with the entered
Offset added to the “Allowable Max Torque” values.
Reset Allowable to Default
This will reset the “Allowable Max Torque” values to the default values.

 Loading...
Loading...









