2 Manipulator Coordinate Systems and Operations
2.4 Coordinate Frames and Manipulator Jogging
2-7
HW1485509
HW1485509
All jogging modes have the following items in common on the Robot Jog
panel.
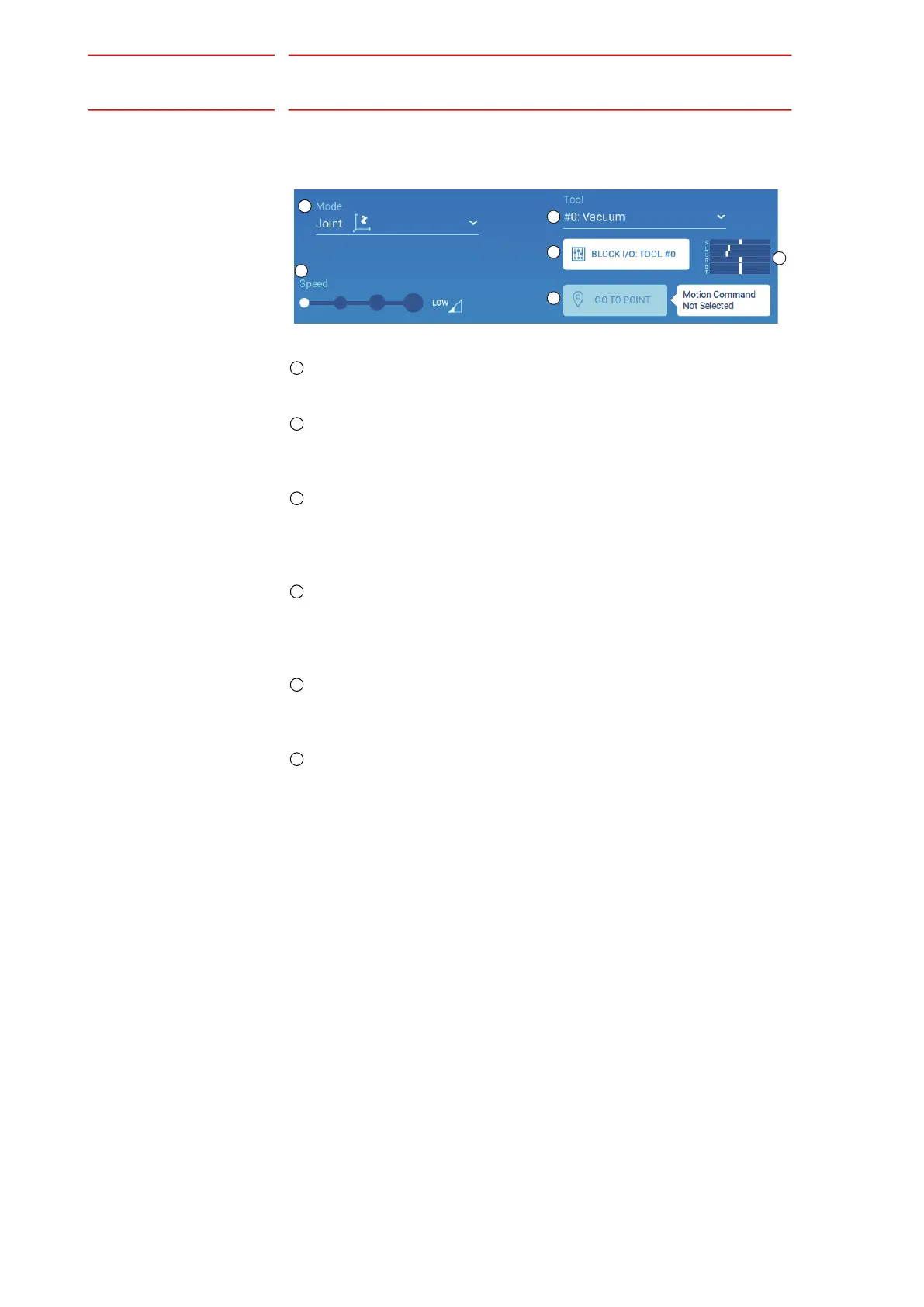
Fig. 2-3: Common Items on Robot Jog Panel (Top)
Jogging Mode
– Control for selecting jogging mode (MANUAL (TEACH) mode).
Jog Speed
– Control for selecting robot jogging speed (MANUAL (TEACH)
mode). The user can select one of four different speeds
Active Tool
– Control to select the active tool. The active tool stores physical
parameters (input by the user) that are often critical to proper
operation
Block I/O for Tool
– Control used to toggle between user-defined ON & OFF Block I/O
states for the active tool. The ON/OFF states are configured on the
Block I/O screen
Current Axis Status Panel
– Panel with interactive indicator bars that visually display the position
of each axis
GO TO POINT Button
– Control for moving the robot to programmed points in a job file. The
user can highlight a “Move” command on the Job Contents view
above the Robot Jog panel. Then press and hold the {GO TO
POINT} to move to that command. An accompanying message will
be displayed to the right of this button.
The following sections provide more detail on the different jogging modes
and the coordinated systems they represent.