2 Manipulator Coordinate Systems and Operations
2.4 Coordinate Frames and Manipulator Jogging
2-9
HW1485509
HW1485509
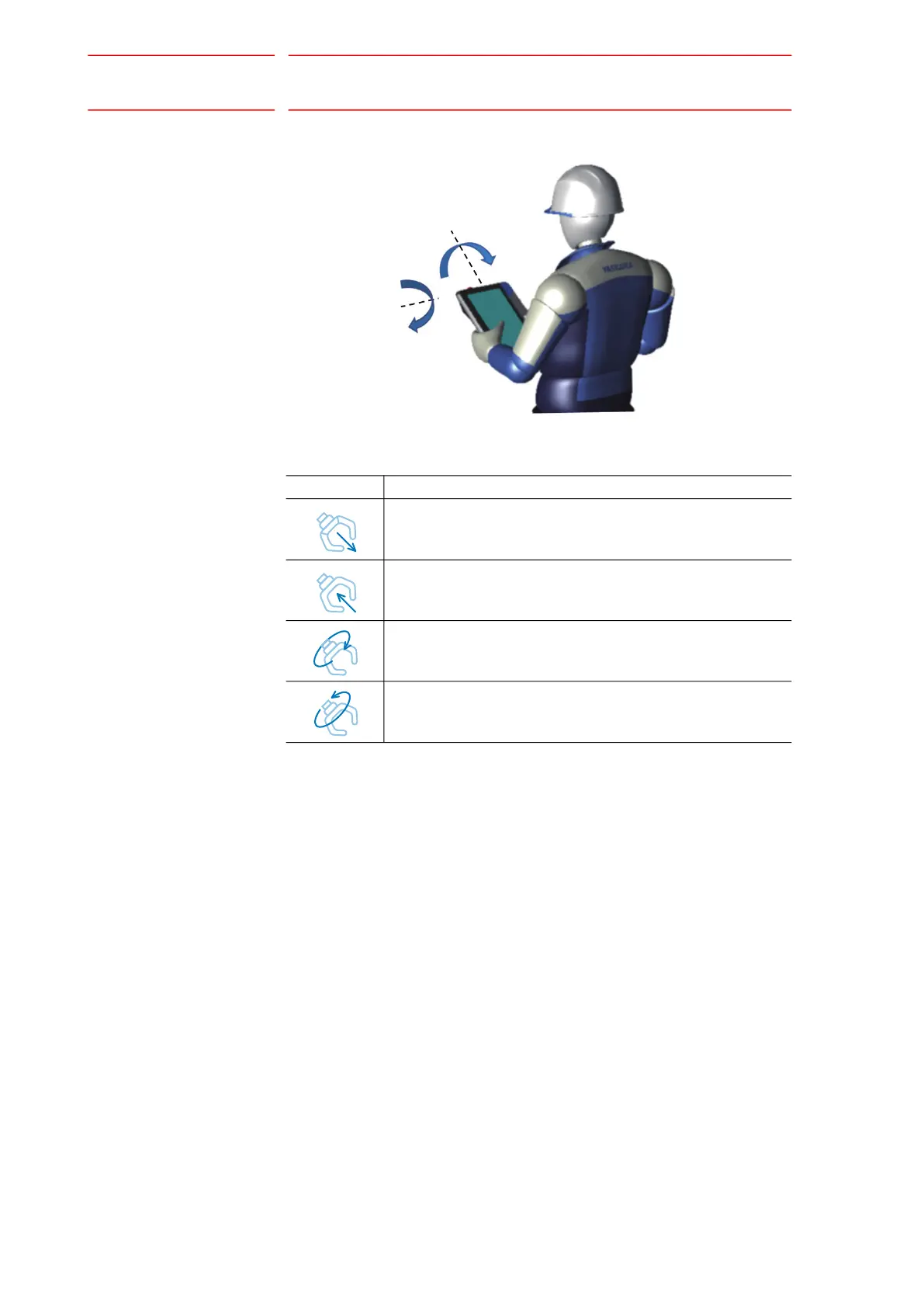
Fig. 2-5: Smart Frame Orientation
The Robot/Tool Toggle button in the middle of the screen can be used to
flip the Robot/Tool Panels to the other side.
Table 2-1: Smart Frame Tool Buttons
Tool Button Description
Move robot TCP in +Z direction with respect to Tool Frame
Move robot TCP in -Z direction with respect to Tool Frame
Rotate robot TCP around +Z Tool Frame axis (+Rz)
Rotate robot TCP around -Z Tool Frame axis (-Rz)