2 Manipulator Coordinate Systems and Operations
2.4 Coordinate Frames and Manipulator Jogging
2-22
HW1485509
HW1485509
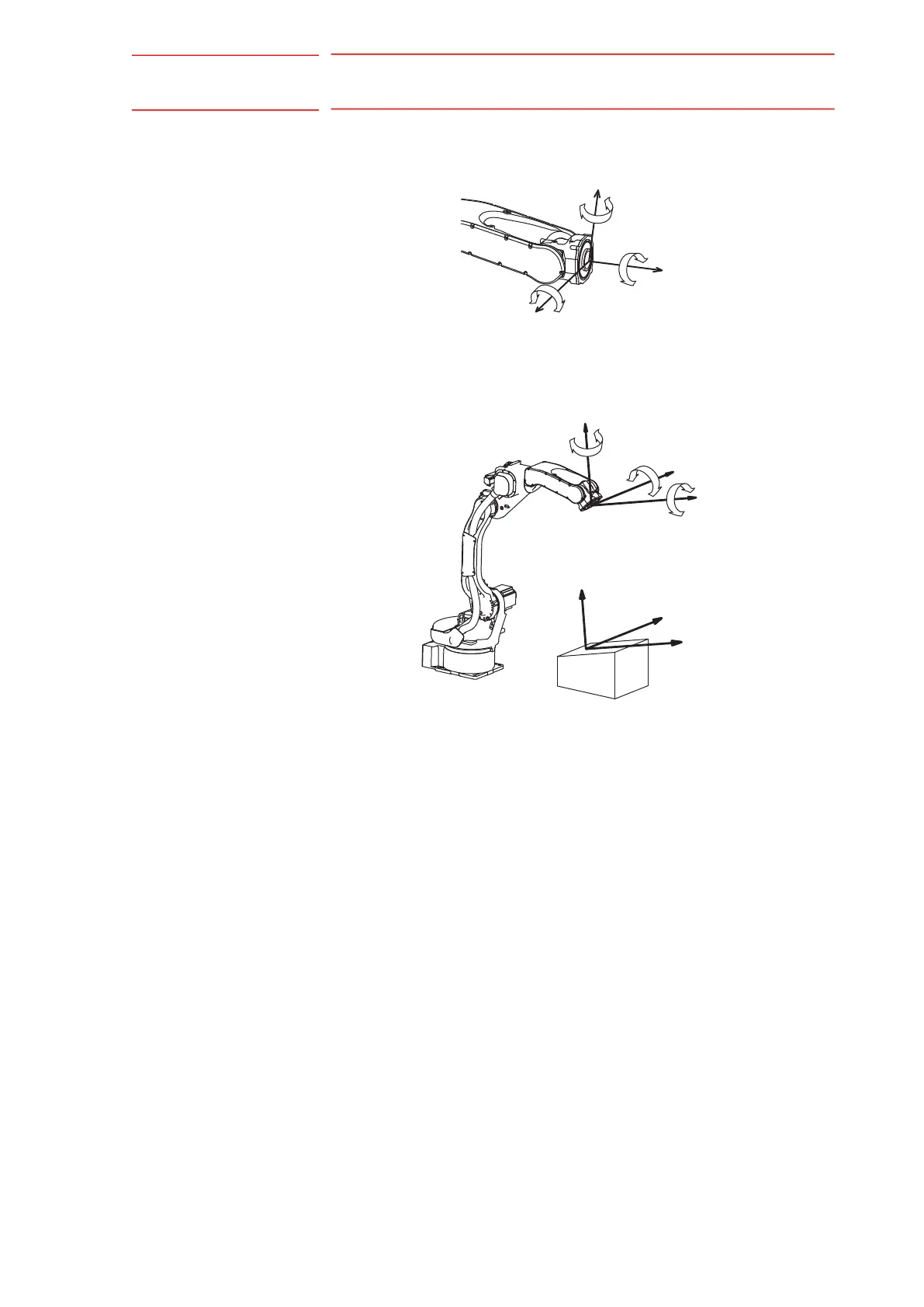
– In Tool Frame, wrist axis rotations are based on the X, Y, and Z axes
of the tool coordinates.
– In User Frame, wrist axis rotations are based on the X, Y, and Z
axes of the user coordinates.
Z-axis
X-axis
Y-axis
Z-axis
X-axis
Y-axis
+
-
+
-
+
-