7.7.2. Current limits
For the purpose of current limitation, a maximum overload current can be set for the
inverter. If the current consumption of the motor exceeds this current limit, the inverter
changes its dynamic behaviour, in order to counteract this exceedance.
Details
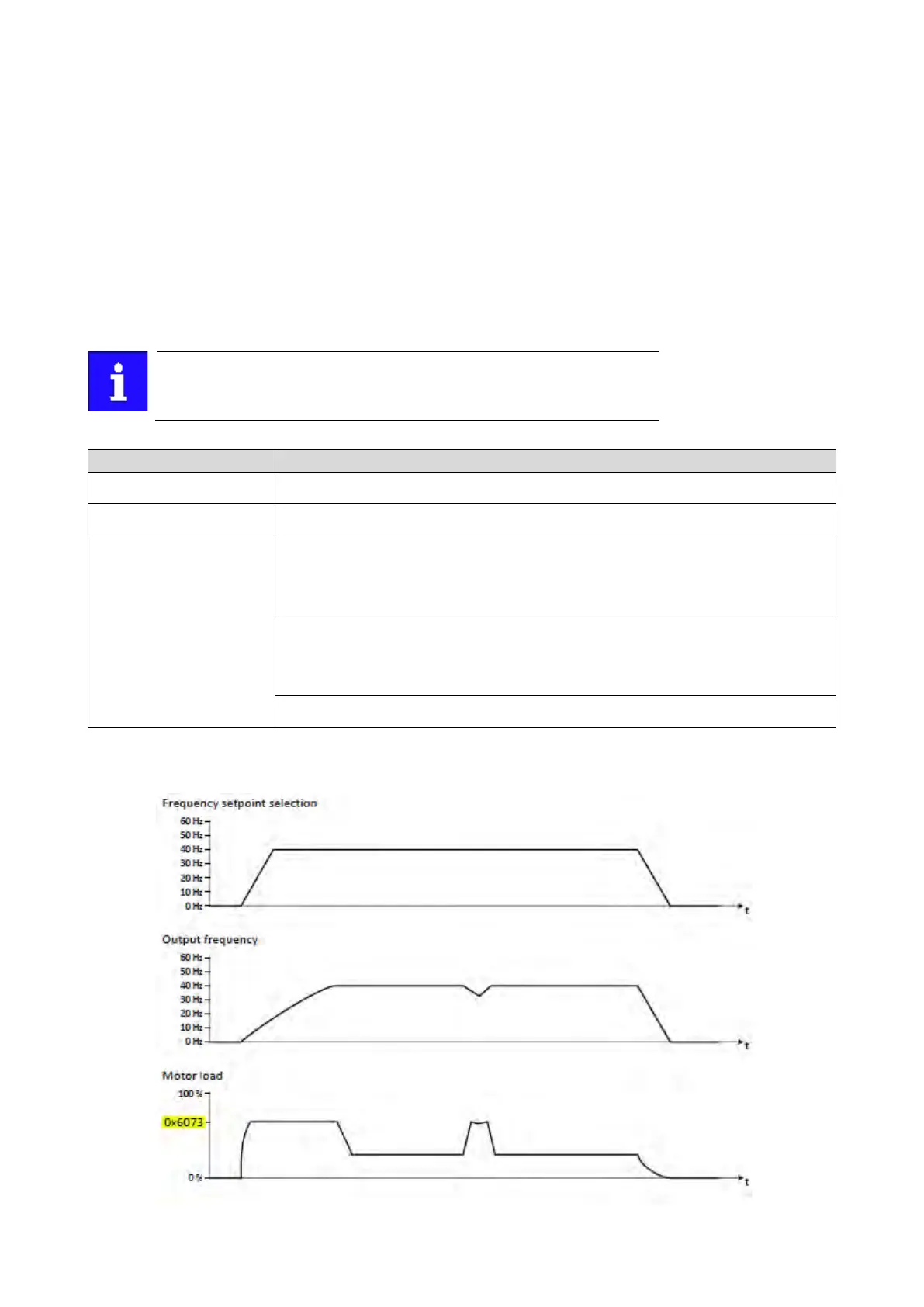
• The maximum overload current of the inverter can be set in 0x6073 (P324.00).
• Reference for the percentage setting of the maximum overload current is the rated
motor current set in 0x6075 (P323.00).
• The actual motor current is displayed in 0x2D88 (P104.00).
If the change in the dynamic behaviour carried out by the inverter does not
result in exiting the overcurrent state, the inverter outputs an error.
Overload during acceleration in
motor mode
A longer time than is required for reaching the frequency setpoint is set.
Overload during deceleration in
generator mode
A longer time than is required for reaching standstill is set.
Increasing load at constant
frequency
If the motor current limit value is reached:
The inverter reduces the effective speed setpoint until a stable working is set or an effective speed setpoint
of
0 rpm is reached.
If the load is reduced, the inverter increases the effective speed setpoint until the setpoint speed is
reached or the load reaches the current limit value again.
When the generator current limit value is reached:
The inverter increases the effective speed setpoint until a stable working point is reached or up to the
max
imum permissible output frequency 0x2916 (P211.00).
If the load is reduced, the inverter reduces the effective speed setpoint until the setpoint speed is reached
or
the load reaches the current limit value again.
If an abrupt load is building at the motor shaft (e.g. drive is blocked), the overcurrent switch-off function
may respond.
Example: Overcurrent switch-off in case of a sudden load at the motor shaft