6 Robot Settings
6.1 Tool Settings
6-16
HW1485509
HW1485509
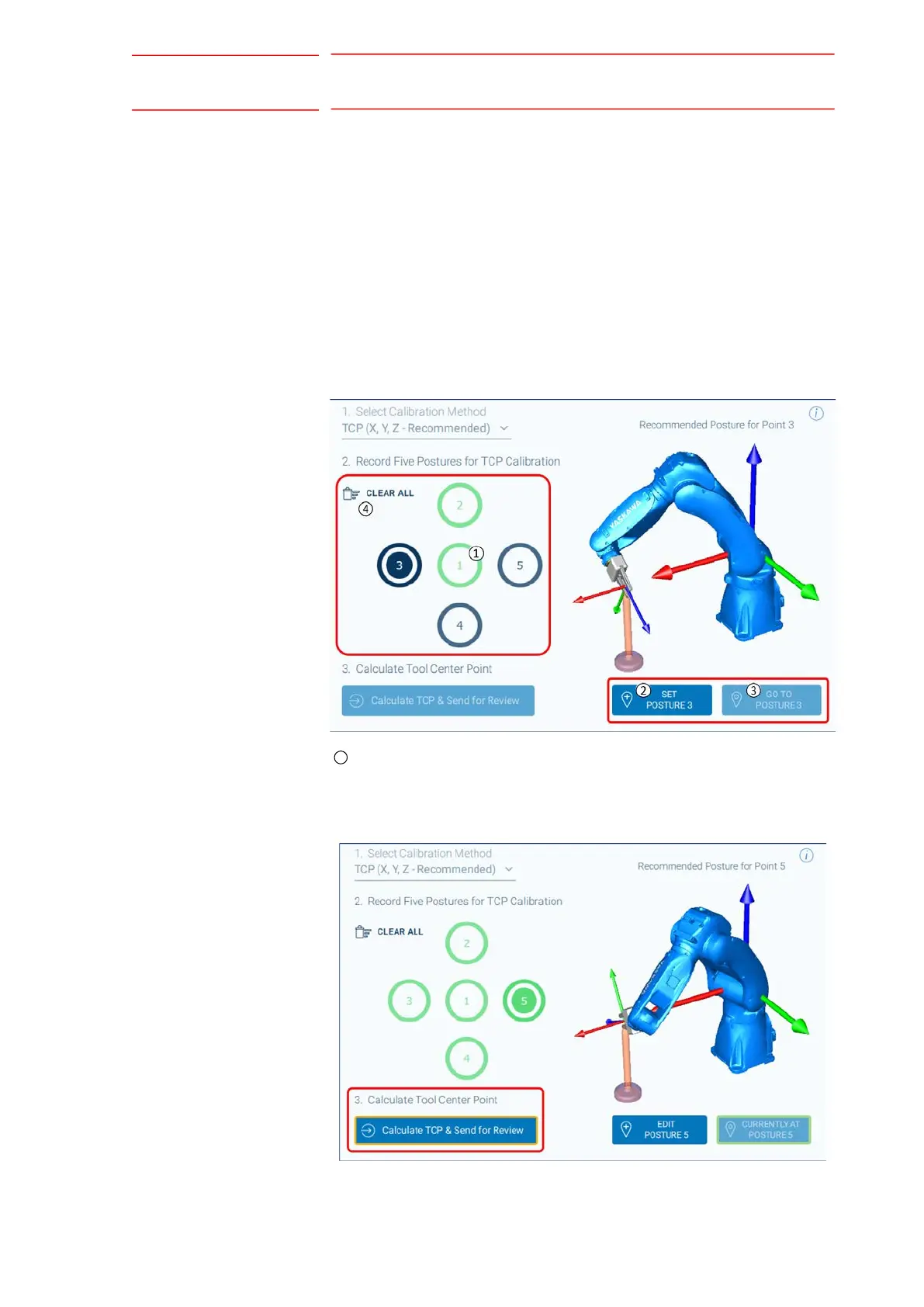
Use the following procedure to {Set} and {Go To} the recommended
postures above:
1. Select a Calibration Posture (1 to 5).
– Check its status (Green = “Saved”, Blue = “Undefined”). If
undefined, jog the Robot to approximately match the
“Recommended Posture” using the Jogging Panel.
2. Once at the desired posture, press {Set} to record its position.
3. Move to previously saved postures using {Go To} buttons.
– If calibrating TCP coordinates, repeat step 1 through step 4 until all
Calibration Postures are green in color.
4. Use the {Clear All} button to remove all previously recorded postures
to re-initialize the calibration process.
Calculate and Confirm New TCP on Tools Screen
Press {Calculate TCP and Send for Review} to send the calculated TCP
data to the {Tools} screen for review. Refer to Chapter 6.1.5 for
instructions to properly save the data.