2 Manipulator Coordinate Systems and Operations
2.4 Coordinate Frames and Manipulator Jogging
2-11
HW1485509
HW1485509
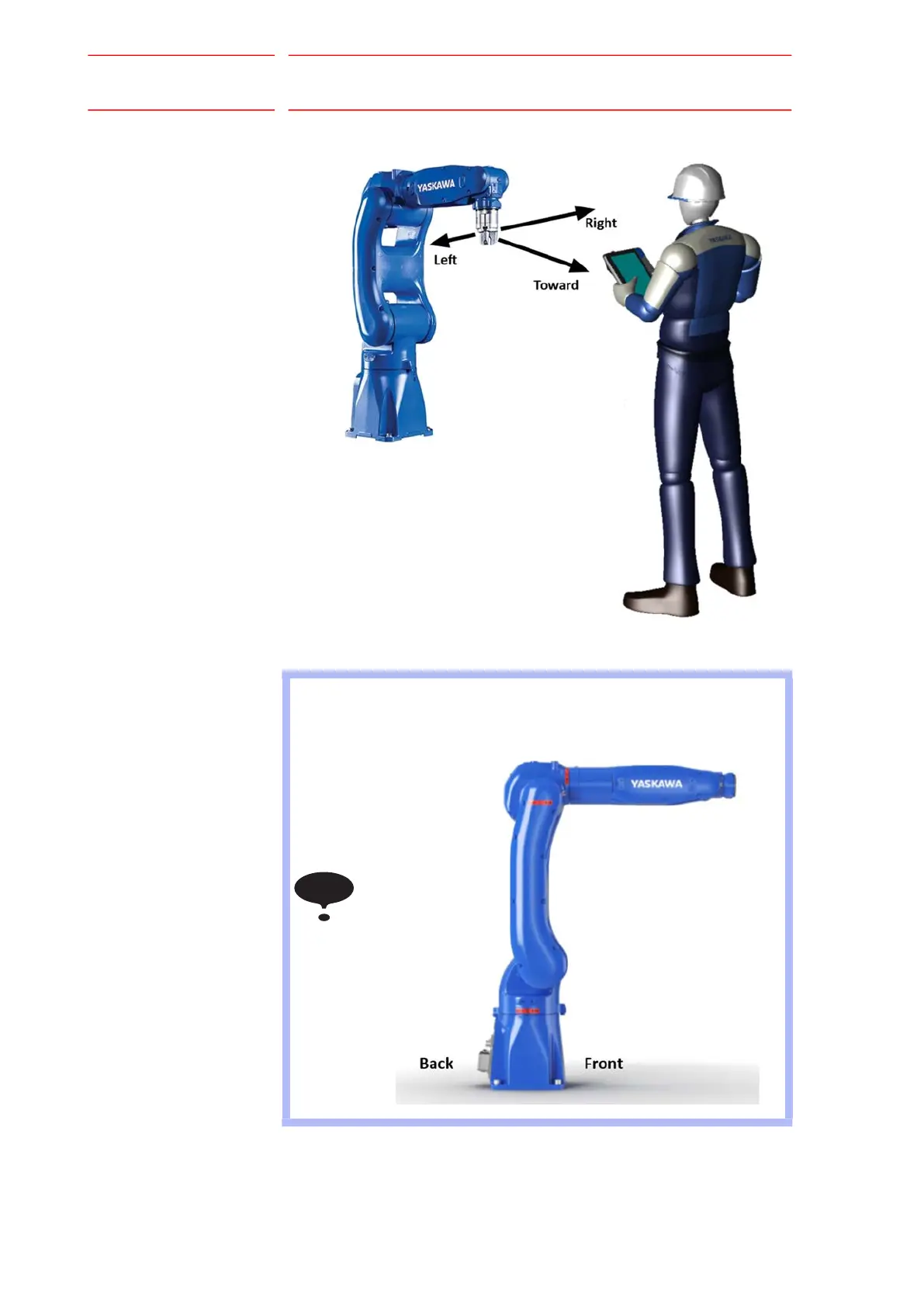
Fig. 2-7: Standing Position and Operation Direction
The front of the Manipulator can be easily identified as the
face of the Manipulator base that is on the opposite side of
the cable connectors on the Manipulator base.
 Loading...
Loading...










