2 Manipulator Coordinate Systems and Operations
2.4 Coordinate Frames and Manipulator Jogging
2-12
HW1485509
HW1485509
The robot can be in any position for sensor calibration.
1. Hold the Smart Pendant and stand facing the front of the robot.
– The top edge of the Smart Pendant must be held parallel to the base
of the manipulator.
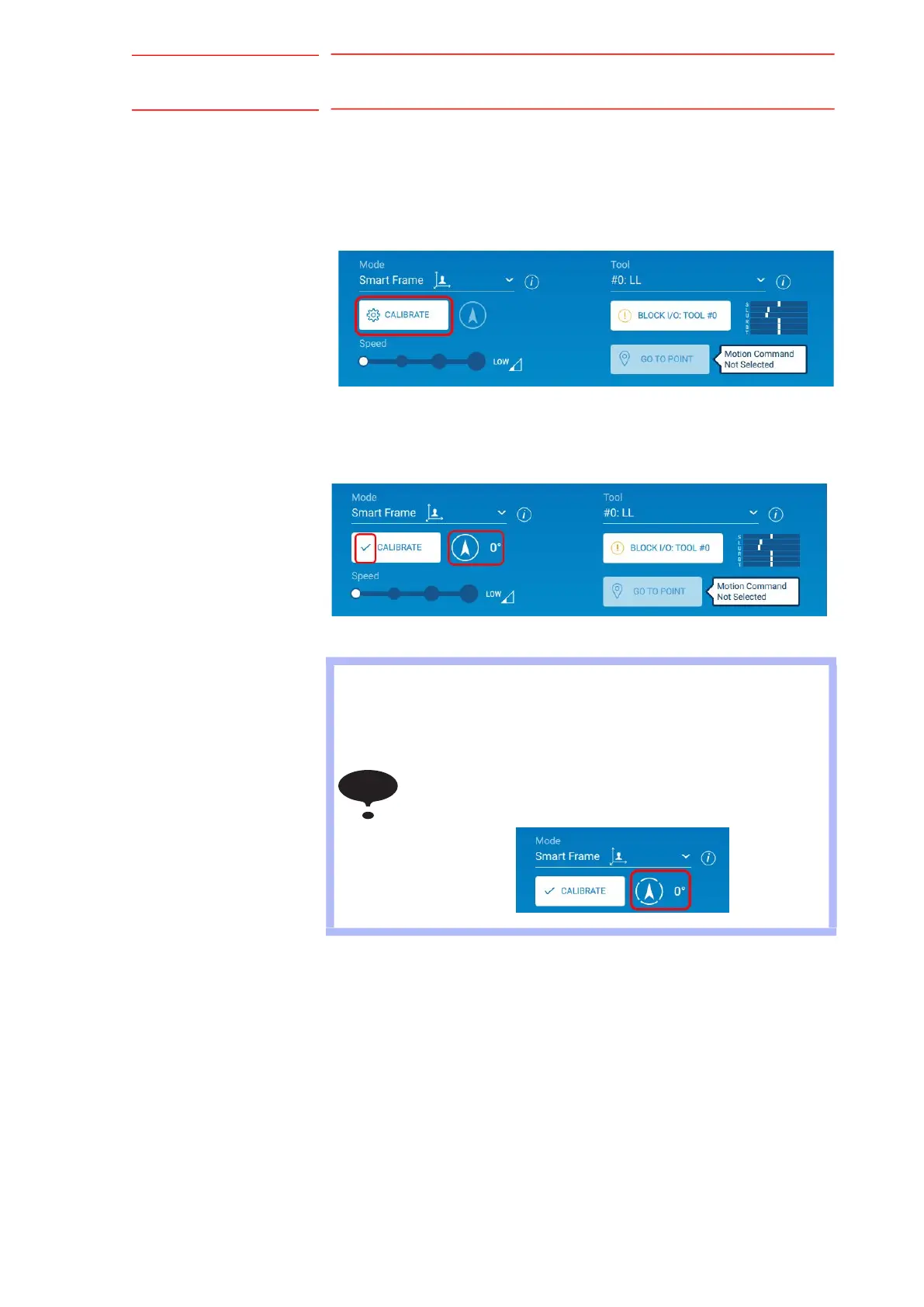
2. Press {CALIBRATE} in the Smart Frame,
– After the calibration completes:
• {CALIBRATE} shows a check mark
• pendant angle shows next to the heading indicator graphic..
To aid with accurate jogging, the jogging directions can be
locked to the Manipulator-frame axis directions.
• Toggle axis-locked and free jogging by clicking the angle
indicator.
• When axis-locked, the indicator circle shows four
quadrants and will snap to the directions -90, 0, 90, and
180 degrees.