406273/C
455
Vesselcoordinatesystem
Thevesselcoordinatesystemisestablishedtodenetherelativephysicallocations
ofsystemsandsensors.
Whenyouhaveseveraldifferentsensorsandtransducersonyourvessel,andyouwish
eachofthemtoprovideaccuratedata,youneedtoknowtheirrelativephysicalpositions.
Theantennaofapositionsensoristypicallymountedhighabovethesuperstructure,
whileamotionsensorislocatedclosetothevessel’scentreofgravity.Bothofthese
arephysicallypositionedfarawayfromthetransduceronadepthsensor,whichmaybe
locatedclosertothebow.Veryoften,theinformationfromonesensordependsondata
fromanother.Itisthenimportantthattherelevantmeasurementsarecompensatedfor
theserelativedistances.
Example
Ifyouwishtomeasuretheactualwaterdepth,youwillneedtoknowthe
verticaldistancefromtheechosoundertransducertothewaterline.Since
thevessel’sdisplacementchangeswiththeamountofcargo,fueletc,the
physicallocationofthewaterlineonthehullmusteitherbemeasuredata
regularbasis,ormeasuredwithasecondsensor.
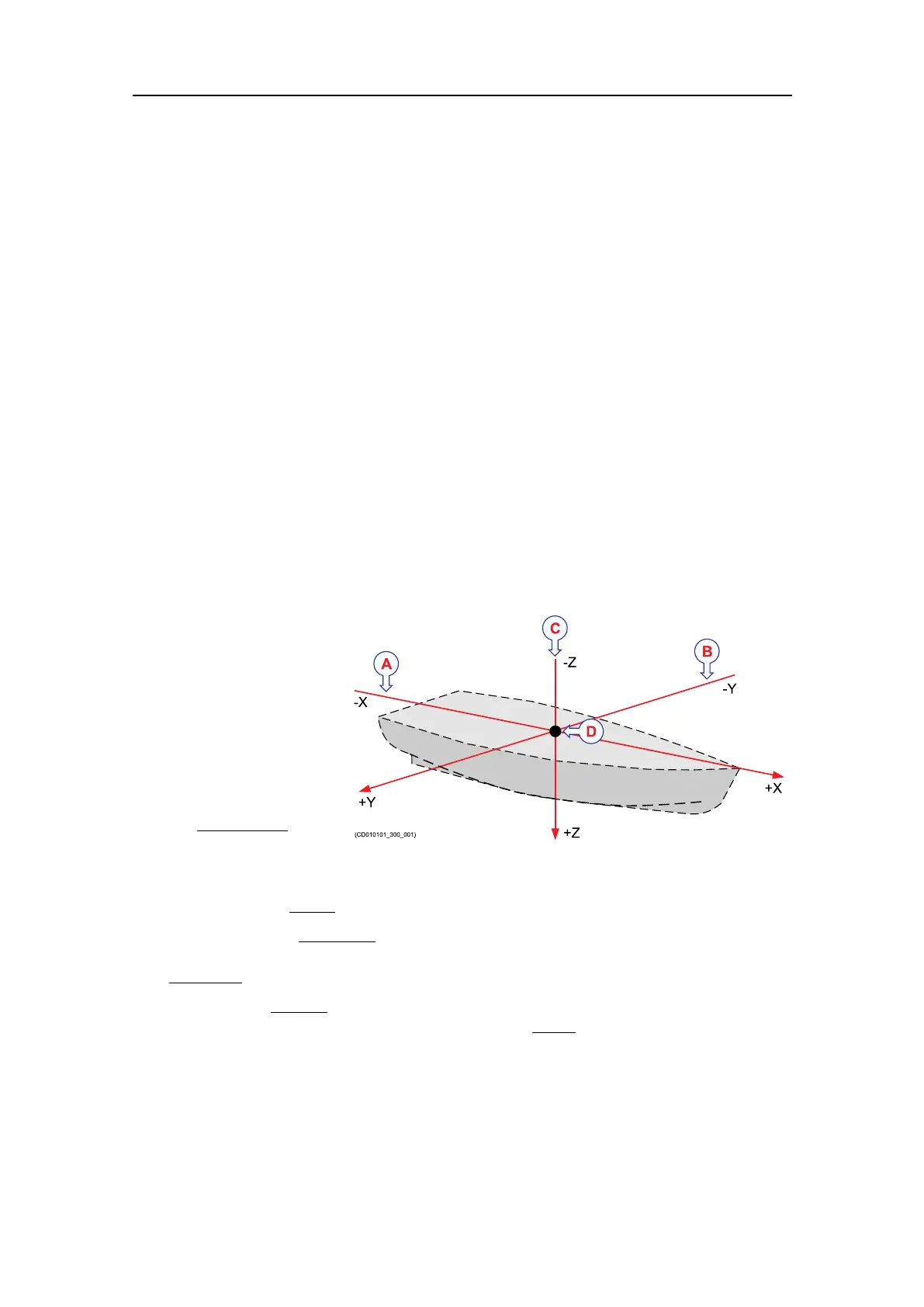
Inordertoestablish
asystemtomeasure
therelativedistance
betweensensors,a
virtualcoordinatesystem
isestablished.This
coordinatesystemuses
threevectors;X,YandZ.
ATheX-axisis
thelongitudinal
directionofthe
vessel,andin
parallelwiththedeck.ApositivevalueforXmeansthatasensororareference
pointislocatedahead
ofthereferencepoint(origin).
BTheY-axisisthetransverse
directionofthevessel,andinparallelwiththedeck.
ApositivevalueforYmeansthatasensororareferencepointislocatedonthe
starboard
sideofthereferencepoint(origin).
CTheZ-axisisvertical
,andinparallelwiththemast.ApositivevalueforZmeans
thatasensororanewreferencepointislocatedunder
thereferencepoint(origin).
DReferencepoint(ShipOrigin)
Coordinatesystemorigin
Theoriginisthecommonreferencepointwhereallthreeaxisinthevesselcoordinate
systemmeet.Allphysicallocationsofthevessel’ssensors(radarandpositioning
systemantennas,echosounderandsonartransducers,motionreferenceunits,etc.)are
Conceptdescriptions