458
406273/C
Maximumdetectiondepth(Single-beamtransducers)
Trans-
ducers
Fre-
quency
(kHz)
Pulse
duration
(ms)
Beam
angle
(deg)
Band-
width
(Hz)
TX
Power
(W)
Range
(m)
120-1512011030261000800
200-72001
7
30881000500
710-3671012,8308810070
38/200
2001
7
30261000450
50/200
2001
7
30881000450
Theserangecalculationsassumeanormalseawatersalinity(3.5%)andtemperature
(+10°C),anaveragebottom(surfacebackscatteringstrength=-20dB)andanoise
leveltypicalforamovingvessel.
Relatedtopics
ChoosingRangeandStartRangevaluesinasurfacerelatedechogram,page94
ChoosingRangeandStartRangevaluesinabottomrelatedechogram,page95
Rangefunction,page309
StartRangefunction,page310
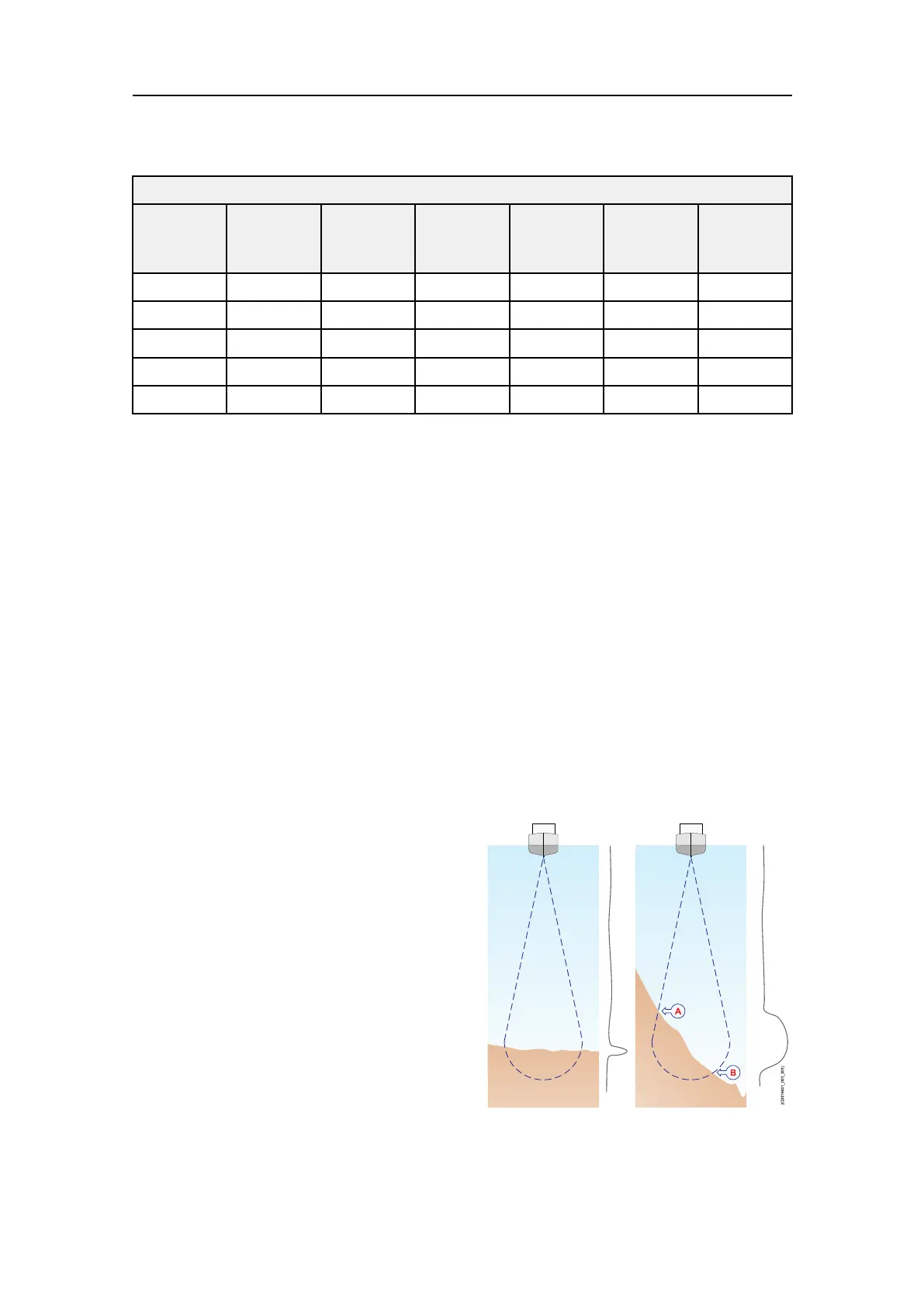
Aboutbottomechoes
Ahardatbottomreectsthetransmittedsignalasifitwasamirror.Thetransmitted
pulsehitstheilluminatedbottomareaatnearlythesameinstant,andtheechofrom
differentpartsofthisareaarrivebackatthesurfacealsoatnearlythesameinstant.A
differentsituationariseswhenthebottomisnotatanylonger.
Thereceivedechosignalisbasically
anattenuatedcopyofthetransmitpulse.
Theechosignalfromaslopedbottomis
characterizedbyhavingalongerduration
andaslowerriseandfalltime.The
transmittedpulsersthitstheslopeatpoint
(A),andastimeelapsesthereectionpoint
travelsalongtheslopetowardspoint(B).
Manylocationsdonothaveasolid
hardbottom.Frequently,thebottomis
composedoflayersofmud,clayandsand
whichcanbeobservedascolouredbands
intheES80echograms.
Thebottomdetectionalgorithmis
implementedsolelyinsoftware,andseparatealgorithmsarerunforeachfrequency
channel.Thealgorithmisdesignedwithemphasisonreliabilityinthesensethat
SimradES80ReferenceManual