K3: Compensations
4.2 Temperature compensation
Extended Functions
230 Function Manual, 03/2013, 6FC5397-1BP40-3BA1
Specifying parameters
The temperature compensation parameters must now be determined on the basis of the
measurement results (see diagram above).
Reference position P
0
As the diagram above illustrates, there are basically two methods of parameterizing
reference position P
0
:
1. P
0
= 0 with position-independent temperature compensation value K
0
≠ 0
2. P
0
≠ 0 with position-independent temperature compensation value K
0
= 0
In this case, version 2 is chosen, which means that the position-independent temperature
compensation value is always 0. The temperature compensation value therefore only
consists of the position-dependent component.
The following parameters are obtained:
● MD32750 $MA_TEMP_COMP_TYPE = 2
(only position-dependent temperature compensation active)
● P
0
= 320 mm → SD43920 $SA_TEMP_COMP_REF_POSITION = 320
(reference position for position-dependent temperature compensation)
Coefficient tanβ (T)
In order to determine the dependency of coefficient tanβ of the position-dependent
temperature compensation on the temperature, the error curve gradient is plotted against the
measured temperature:
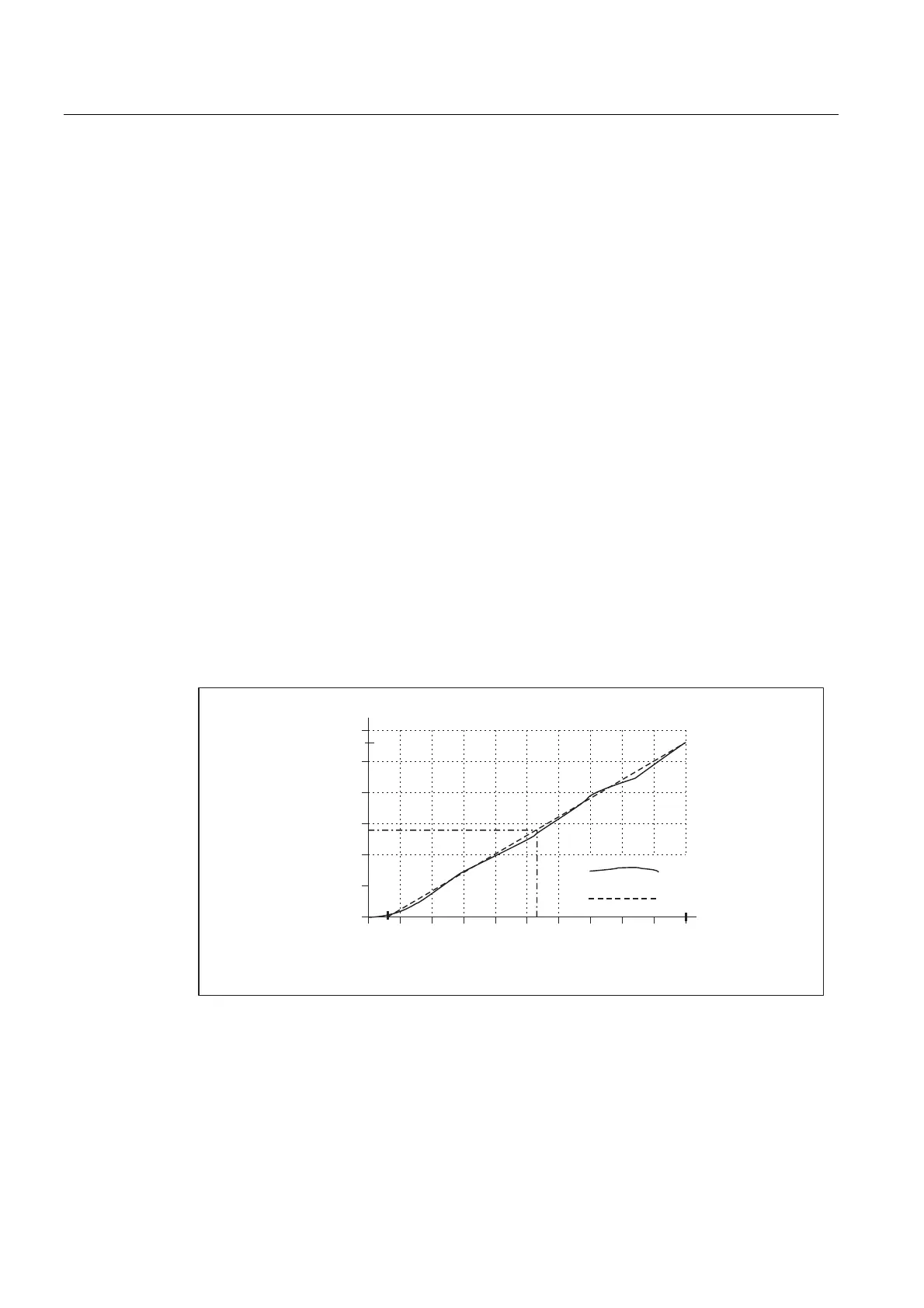
0HDVXUHGFXUYH
FKDUDFWHULVWLF
6WUDLJKWOLQH
7PD[7
7.
PD[
$EVROXWHWHPSHUDWXUH>GHJUHHV@
7&FRHIILFLHQW
>wPPP@
Figure 4-3 Characteristic of coefficient tanβ as a function of measured temperature T
With the appropriate linearization, coefficient tanβ depends on T as follows:
tanβ(T) = (T - T
0
) * TK
max
* 10
-6
/ (T
max -
T
0
)
with
T
0
= temperature at which position-dependent error = 0; [degrees]

 Loading...
Loading...










