K3: Compensations
4.6 Friction compensation (quadrant error compensation)
Extended Functions
294 Function Manual, 03/2013, 6FC5397-1BP40-3BA1
4.6.4 Friction compensation with acceleration-dependent compensation value
4.6.4.1 Description of functions
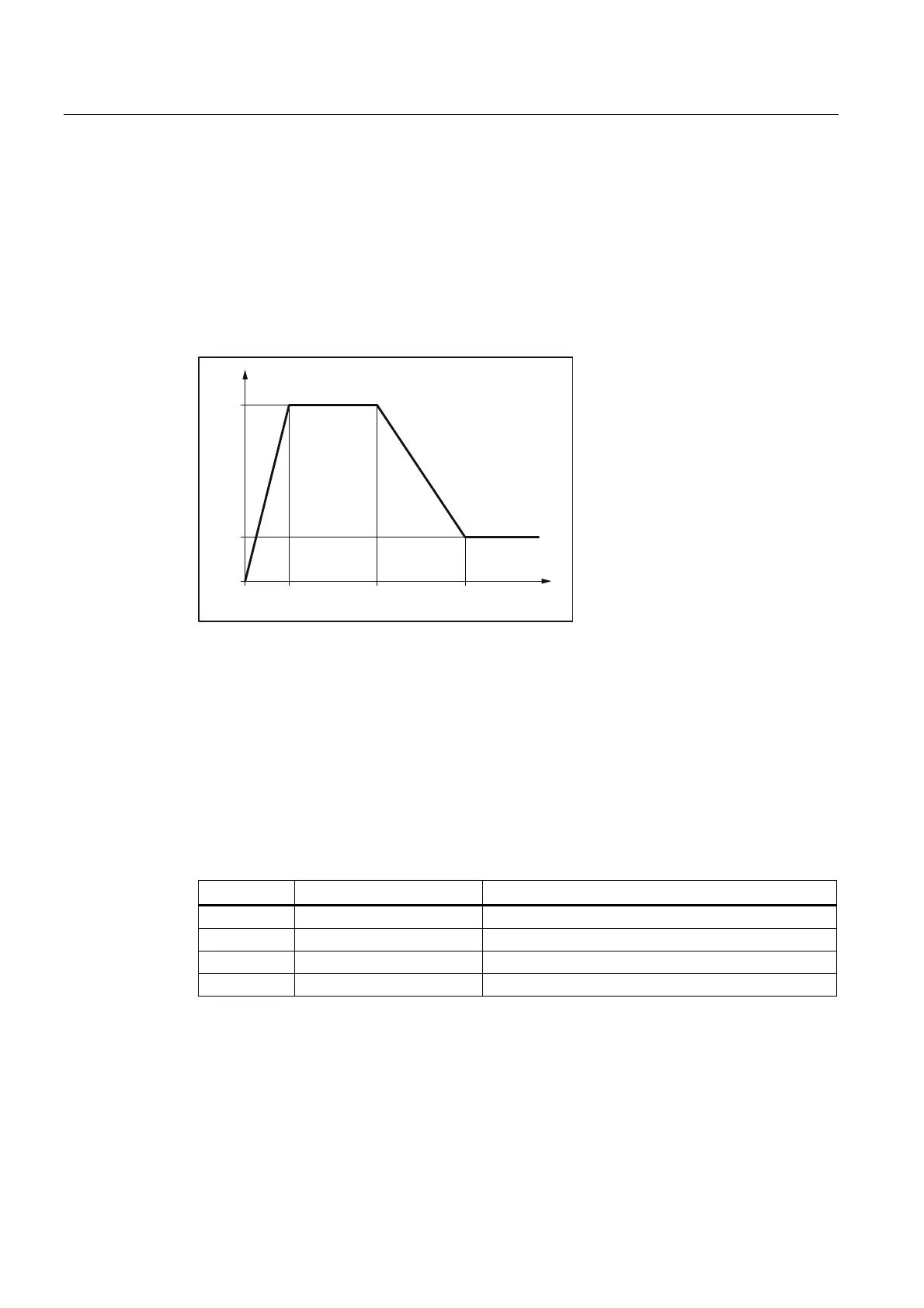
If the compensation value is highly dependent on the acceleration, normally a smaller
compensation value must be injected for optimum compensation with larger accelerations
than for smaller accelerations. This dependency can be modeled via the following adaptation
characteristic.
D
˂Q
PD[
˂Q
PLQ
%
D
˂Q
%
% %
D
D
Δn
max
Maximum compensation value
Δn
min
Minimum compensation value
a
1
Acceleration value 1
a
2
Acceleration value 2
a
3
Acceleration value 3
Bn Acceleration range with n = 1, 2, ... 4
with: Accelerations: a
1
< a
2
< a
3
Compensation values: Δn
max
> Δn
min
, in special cases also Δn
max
< Δn
min
The compensation value Δn is calculated according to the respective acceleration range B1
to B4 as follows:
Range With acceleration a ⇒ Compensation value Δn
B1 a < a
1
Δn = Δn
max
* a / a
1
B2 a
1
≤ a ≤ a
2
Δn = Δn
max
B3 a
2
< a < a
3
Δn = Δn
max
+ [(Δn
min
- Δn
max
) / (a
3
- a
2
)] * (a - a
2
)
B4 a ≥ a
3
Δn = Δn
min

 Loading...
Loading...










