M1: Kinematic transformation
6.6 Cartesian PTP travel
Extended Functions
402 Function Manual, 03/2013, 6FC5397-1BP40-3BA1
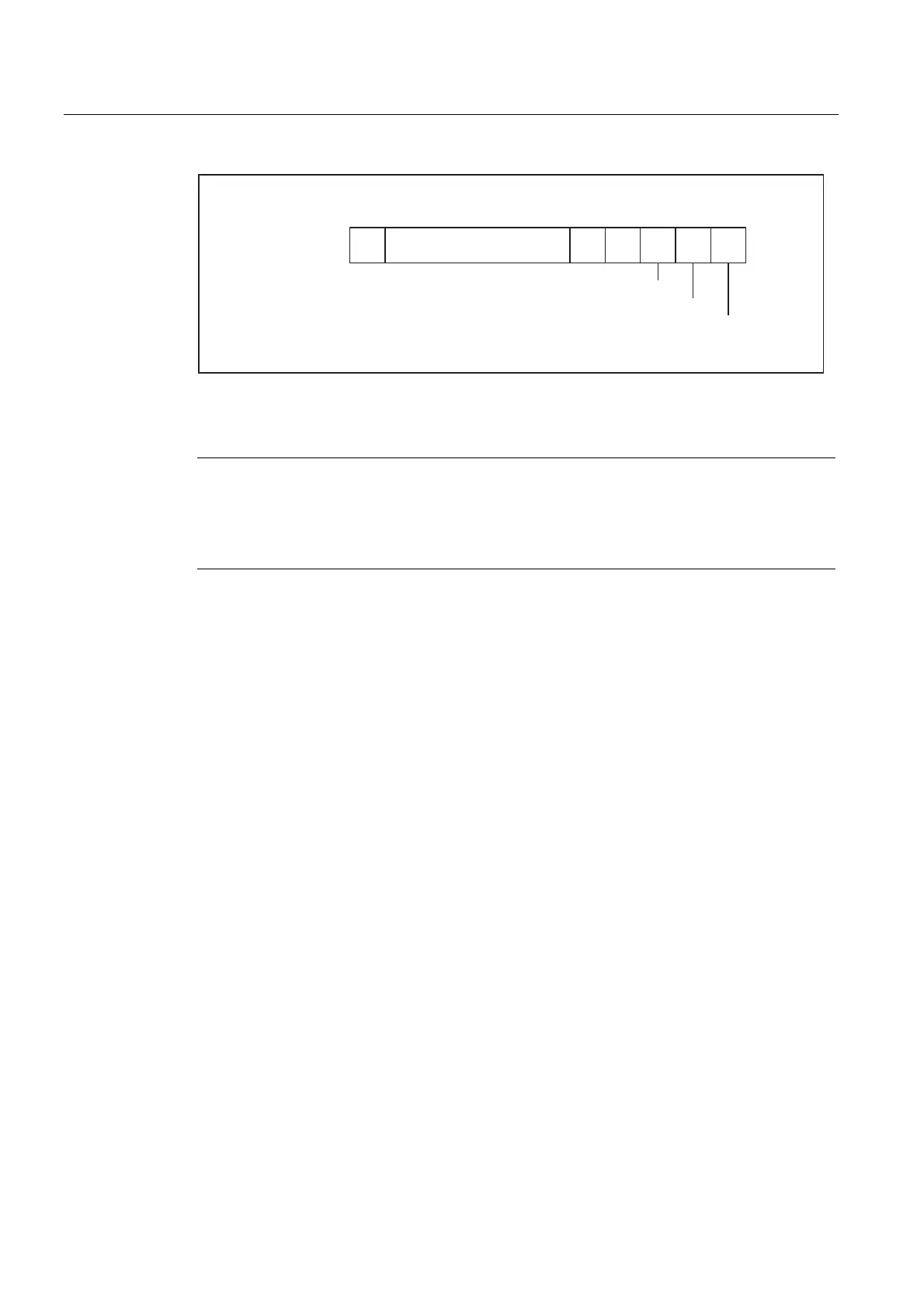
2YHUKHDGSRVLWLRQ
3RVLWLRQRID[LV
3RVLWLRQRID[LV
%LWQXPEHU
Figure 6-16 Position bits for Handling Transformation Package
Note
It is only meaningful to program the
STAT address for "Cartesian PTP travel", since changes
in position are not normally possible while an axis is traversing with active transformation.
The starting point position is applied as the destination point for traversal with the CP
command.
6.6.2 Overlap areas of axis angles
TU address
In order to approach axis angles in excess of ±180° without ambiguity, the information must
be programmed in the TU (turn) address. The TU address thus represents the sign of the
axis angles. This allows an axis angle of |θ| < 360° to be traversed without ambiguity.
Variable TU contains a bit, which indicates the traversing direction for every axis involved in
the transformation.
● TU bit=0: 0° ≤ θ < 360°
● TU bit=1: 360° < θ < 0°
The TU bit is set to 0 for linear axes.
In the case of axes with a traversing range >±360°, the axis always moves across the
shortest path, because the axis position cannot be specified uniquely by the TU information.
If no TU is programmed for a position, the axis always traverses via the shortest possible
route.
 Loading...
Loading...











