K3: Compensations
4.4 Interpolatory compensation
Extended Functions
274 Function Manual, 03/2013, 6FC5397-1BP40-3BA1
6HUYR9LHZRIWKHUHDOD[HV
/RJLFDOYLHZIRUSDUW
SURJUDPV
1&8
$;$;$; $;$;$;
,QWHUSRODWLRQ
&KDQRQ1&8&KDQRQ1&8
$;$;$; $;$;$;
;5 <5 =5 ;; << ==
,QWHUSRODWLRQ ,QWHUSRODWLRQ
$[LVFRQWDLQHU
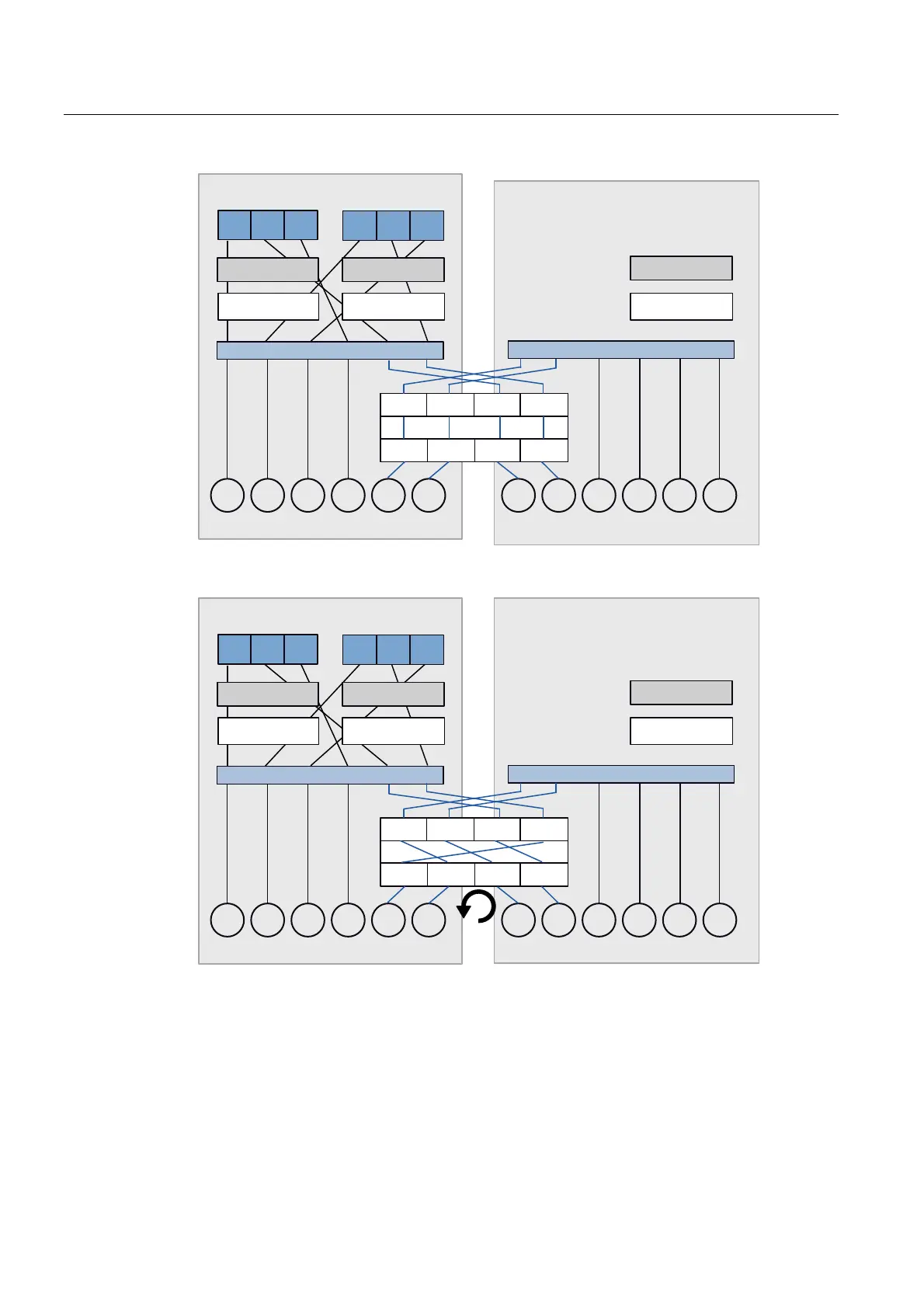
Figure 4-11 Configuration 2: NCU link with axis container in output state
6HUYR9LHZRIWKHUHDOD[HV
/RJLFDOYLHZIRUSDUW
SURJUDPV
1&8
$;$;$; $;$;$;
,QWHUSRODWLRQ
&KDQRQ1&8&KDQRQ1&8
$;$;$; $;$;$;
;5 <5 =5 ;; << ==
,QWHUSRODWLRQ ,QWHUSRODWLRQ
Figure 4-12 Configuration 3: NCU link with axis container in rotary state

 Loading...
Loading...










