M1: Kinematic transformation
6.2 TRANSMIT face end transformation (option)
Extended Functions
Function Manual, 03/2013, 6FC5397-1BP40-3BA1
357
The first MD applies to the first TRANSMIT transformation in the channel and the second MD
correspondingly to the second TRANSMIT transformation.
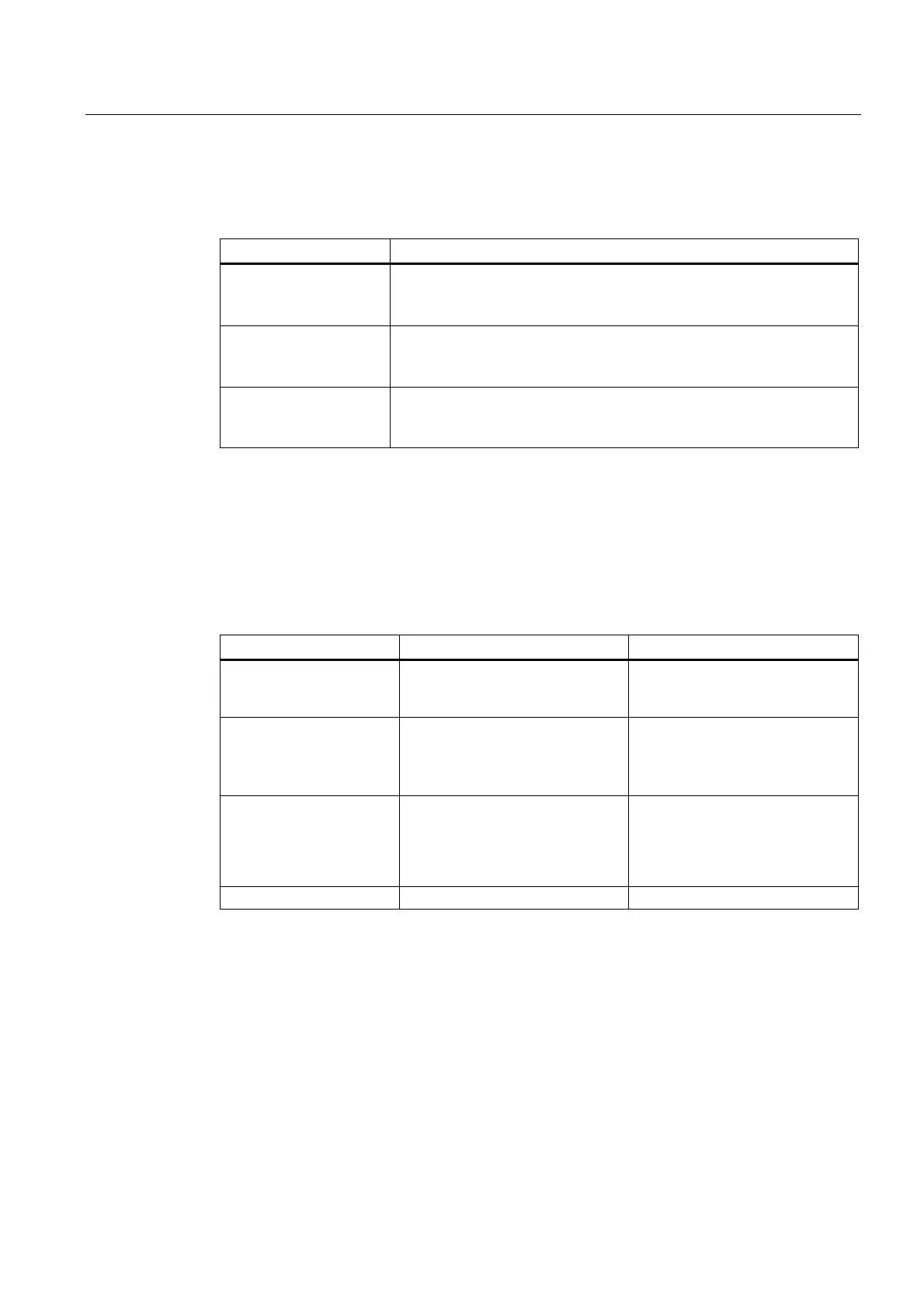
VALUE Meaning
0 Pole traversal
The tool center point path (linear axis) must traverse the pole on a
continuous path.
1 Rotation around the pole.
The tool center point path must be restricted to a positive traversing range
of the linear axis (in front of turning center).
2 Rotation around the pole.
The tool center point path must be restricted to a negative traversing
range of the linear axis (behind turning center).
Special features relating to pole traversal
The method of pole traversal along the linear axis may be applied in the AUTOMATIC and
JOG modes.
System response:
Table 6- 1 Traversal of pole along the linear axis
Operating mode State Response
AUTOMATIC All axes involved in the
transformation are moved
synchronously. TRANSMIT active.
High-speed pole traversal
Not all axes involved in the
transformation are traversed
synchronously (e.g. position axis).
TRANSMIT not active
Traversal of pole at creep speed
An applied DRF (external zero
offset) does not interfere with the
operation. Servo errors may occur
close to the pole during application
of a DRF.
Abortion of machining, alarm
JOG - Traversal of pole at creep speed
Special features relating to rotation in pole
Precondition: This method is only effective in the AUTOMATIC mode.
MD24911 $MC_TRANSMIT_POLE_SIDE_FIX_1 = 1 or 2
MD24951 $MC_TRANSMIT_POLE_SIDE_FIX_2 = 1 or 2
Value: 1 Linear axis remains within positive traversing range
Value: 2 Linear axis remains within negative traversing range

 Loading...
Loading...










