P5: Oscillation - only 840D sl
11.3 Oscillation controlled by synchronized actions
Extended Functions
654 Function Manual, 03/2013, 6FC5397-1BP40-3BA1
6. Do not start partial infeed too early (see Section "Do not start partial infeed too early
(Page 662)").
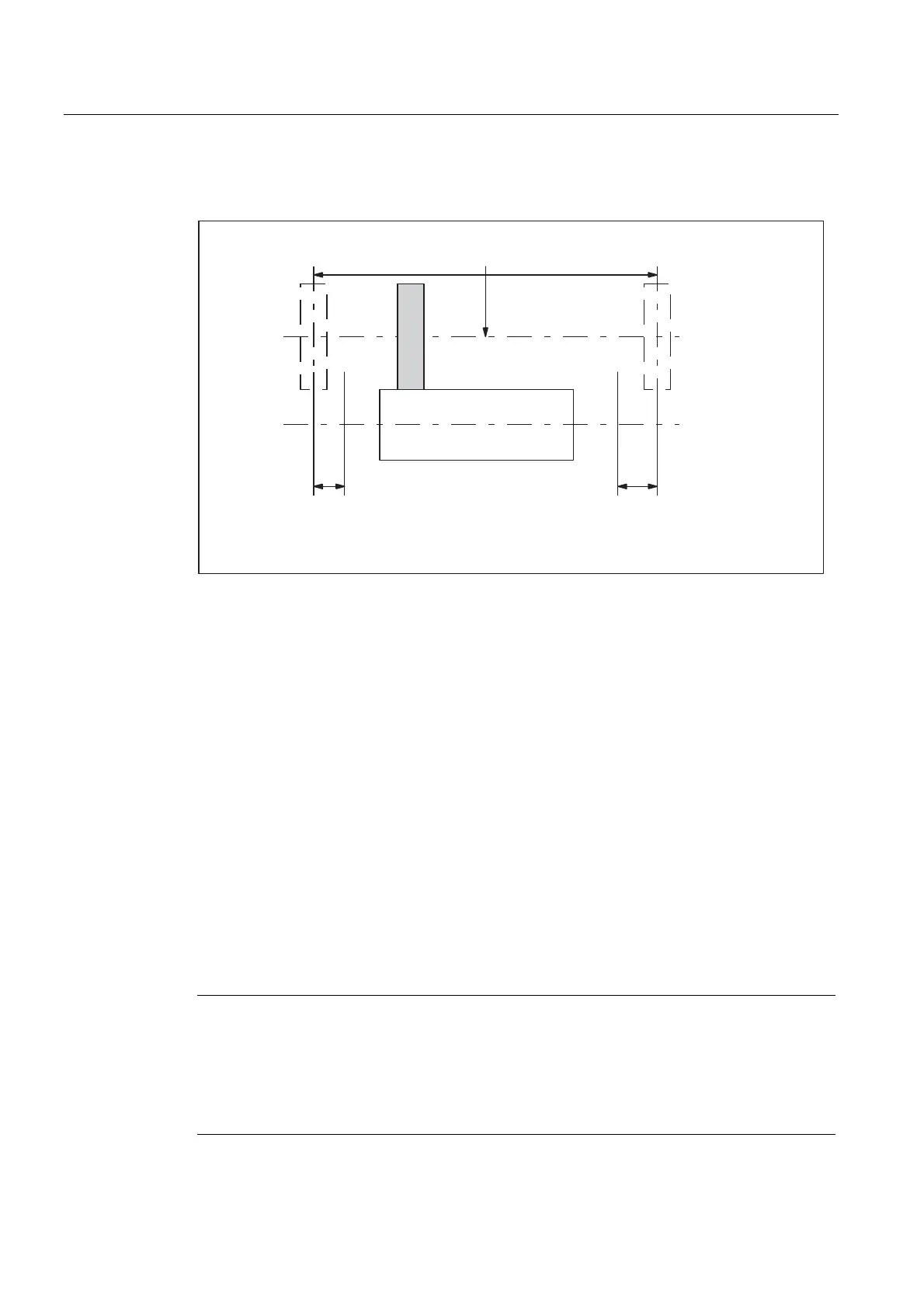
,QIHHG
2VFLOODWLRQSDWK
*ULQGLQJGLVF
:RUNSLHFH
LLLL
88
[
]
Figure 11-1 Arrangement of oscillation and infeed axes plus terms
Legend:
U1: Reversal point 1
U2: Reversal point 2
ii1: Reversal point range 1
ii2: Reversal point range 2
Programming
Before the motion block that contains the assignment between the infeed and the oscillating
axis (see Section "Assignment of oscillation and infeed axes OSCILL (Page 662)"), the
infeed definiti
on (POSP) and the motion-synchronous actions, the parameters for the
oscillation must first be defined (see Section "Influences on asynchronous oscillation
(Page 643)"):
The oscillation axi
s is enabled via a WAITP [oscillation axis] (see MD30552
$MA_AUTO_GET_TYPE), allowing the oscillation parameters to be transferred, i.e. into the
setting data, simultaneously. The symbolic names, e.g. SA43700 $SA_REVERSE_POS1
can then be used to program the motion-synchronous actions.
Note
For motion-synchronous actions with $SA_REVERSE_POS values, the comparison values
at the time of interpretation are valid. If setting data is changed afterwards, this has no
effect.
For motion-synchronous actions with $AA_REVERSE_POS values, the comparison values
within the interpoltation are valid. This ensures a reaction to the modified reversal positions.

 Loading...
Loading...










