SINUS PENTA
PROGRAMMING GUIDE
140/486
20. FOC REGULATORS MENU
20.1. Overview
NOTE
Please refer to the MOTOR CONFIGURATION MENU as well.
NOTE
This menu may be accessed only if the FOC control is programmed for one of the
connected motors (C010=2 for motor n.1, C053=2 for motor n.2, C096=2 for motor n.3).
The FOC control has the same basic structure as that of any classic field oriented control.
The inner loops of FOC control are two PI current regulators having the same parameterization.
The first regulator controls Iq torque current; the second regulator controls Id flux current.
Iq Torque current is computed based on the required torque set-point.
In Slave mode (torque reference), the required set–point comes from the external reference; in Master mode, the
torque set–point is given by the output of the speed regulator (see the SPEED LOOP AND CURRENT BALANCING
MENU) for the regulation of the motor speed of rotation.
Id Flux current results from the output of the flux regulator, ensuring that the connected motor is always properly
fluxed.
This menu allows accessing the current PI regulators and flux regulators for the FOC control.
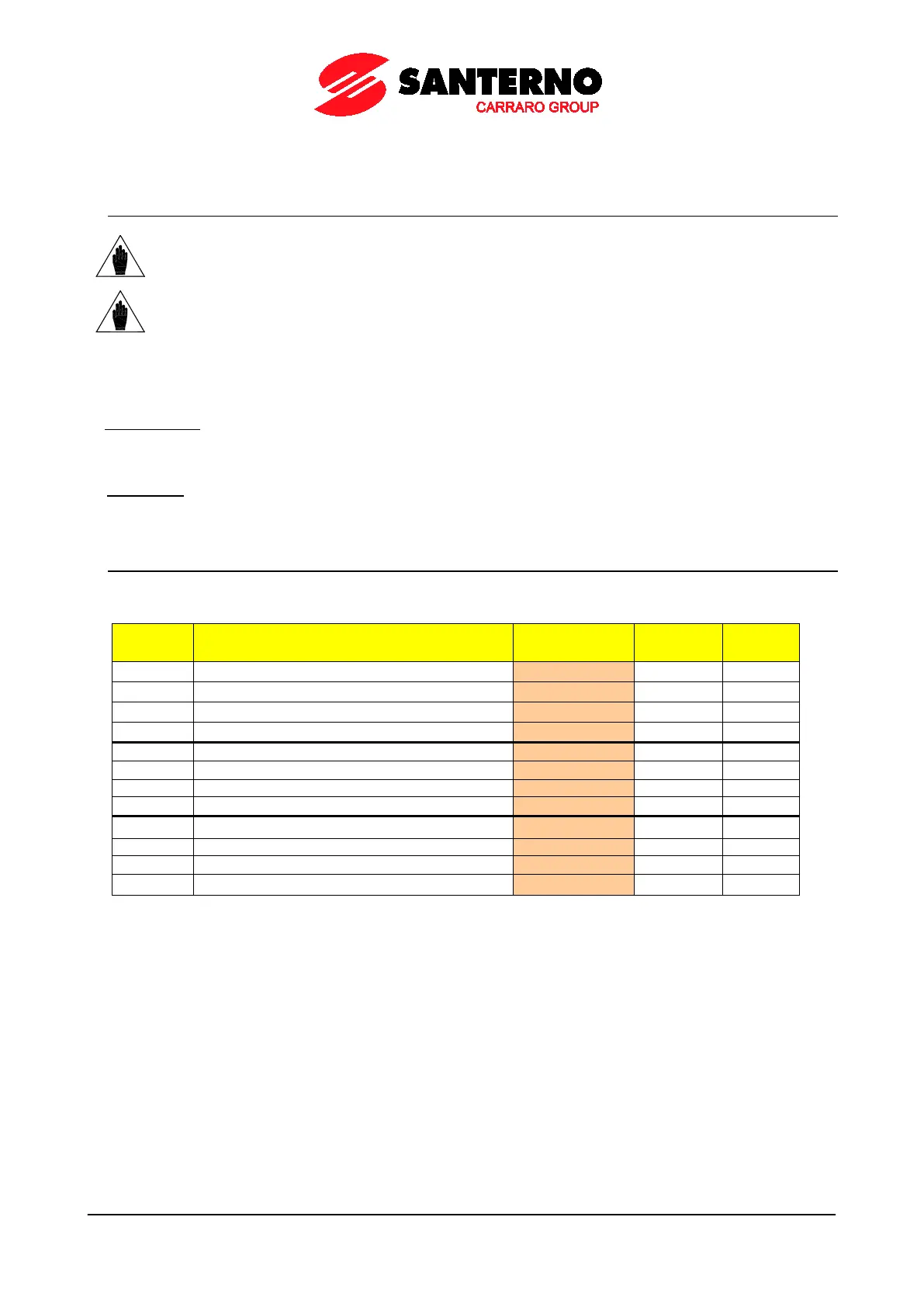
20.2. List of Parameters P155 to P173
Table 34: List of parameters P155 to P173
Parameter FUNCTION User Level
Default
Values
MODBUS
Address
Current regulator proportional constant, Mot n.1
Current regulator integral time, Mot n.1
Flux regulator proportional constant, Mot n.1
Flux regulator integral time, Mot n.1
Current regulator proportional constant, Mot n.2
Current regulator integral time, Mot n.2
Flux regulator proportional constant, Mot n.2
Flux regulator integral time, Mot n.2
Current regulator proportional constant, Mot n.3
Current regulator integral time, Mot n.3
Flux regulator proportional constant, Mot n.3
Flux regulator integral time, Mot n.3