PROGRAMMING GUIDE
SINUS PENTA
171/486
24.2. PID Regulator Tuning – Method of Ziegler and Nichols
Tuning a PID regulator consists in selecting and allocating values to PID parameters in order to adjust the operation of
the system to the technical requirements of the process and to the equipment restrictions.
One of the possible PID tuning procedures is the Method of Ziegler and Nichols.
This method implies the following steps:
1. Set the integral action and the derivative action to zero: Ti (P242) = 0, Td (P243) = 0.
2. Assign very low values to Kp (P240), then apply a little step to the reference signal (setpoint) selected with
C285/286/287.
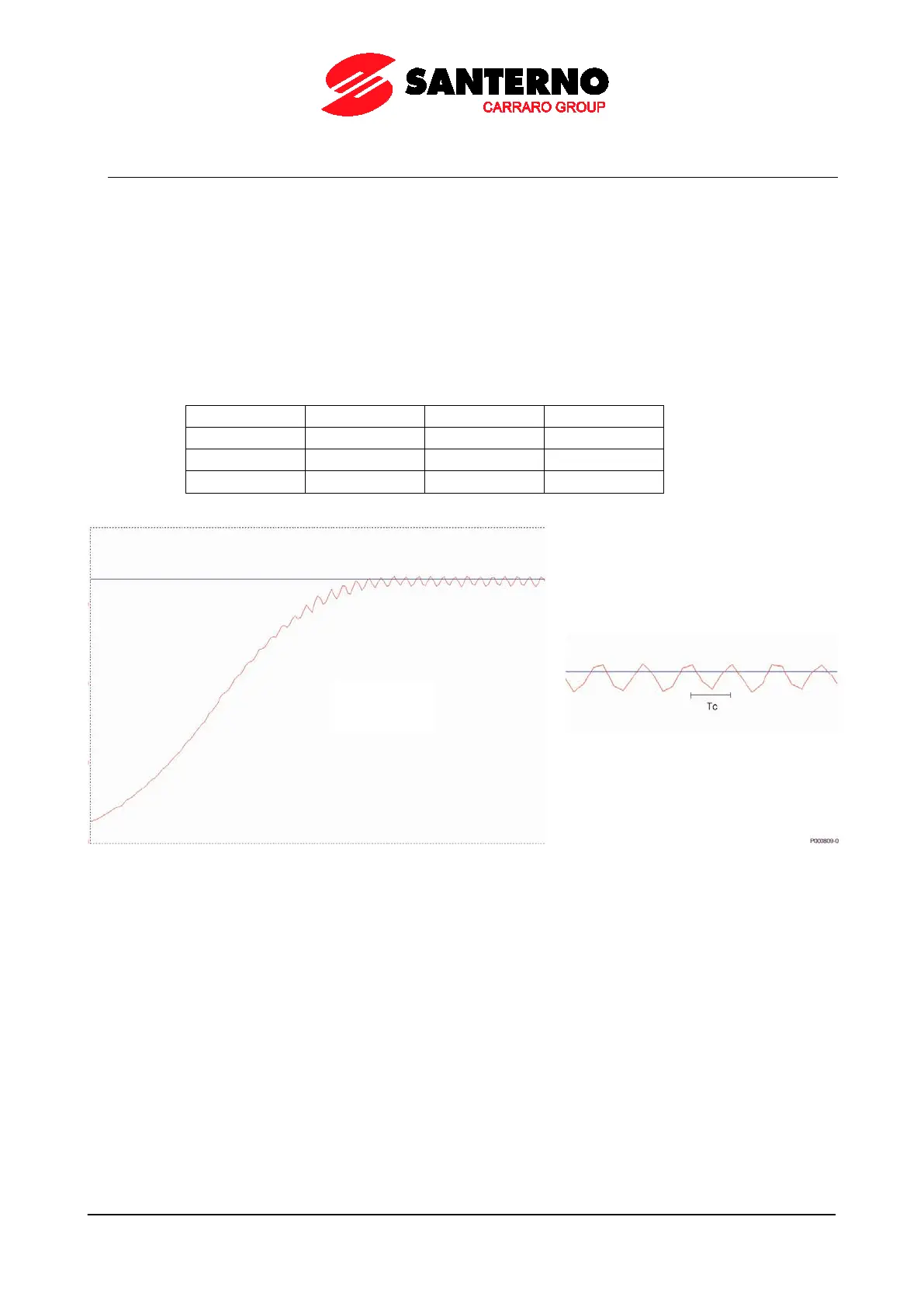
3. Gradually increase the value of Kp until permanent oscillation is attained in the PID loop.
4. Tune the parameters for a P, PI or PID regulator based on the table below—where Kp
c
is the value of the
proportional gain corresponding to the permanent oscillation (critical gain) and T
c
is the period of the permanent
oscillation:
PI 0.45 Kp
c
T
c
/1.2
PID 0.6 Kp
c
T
c
/2 T
c
/8
Figure 25: Permanent oscillation with Kp
c
critical gain