PROGRAMMING GUIDE
SINUS PENTA
265/486
34.1.3. PARAMETERS OF THE EQUIVALENT CIRCUIT OF THE
ASYNCHRONOUS MACHINE
Table 74: Parameters of the equivalent circuit of the asynchronous machine
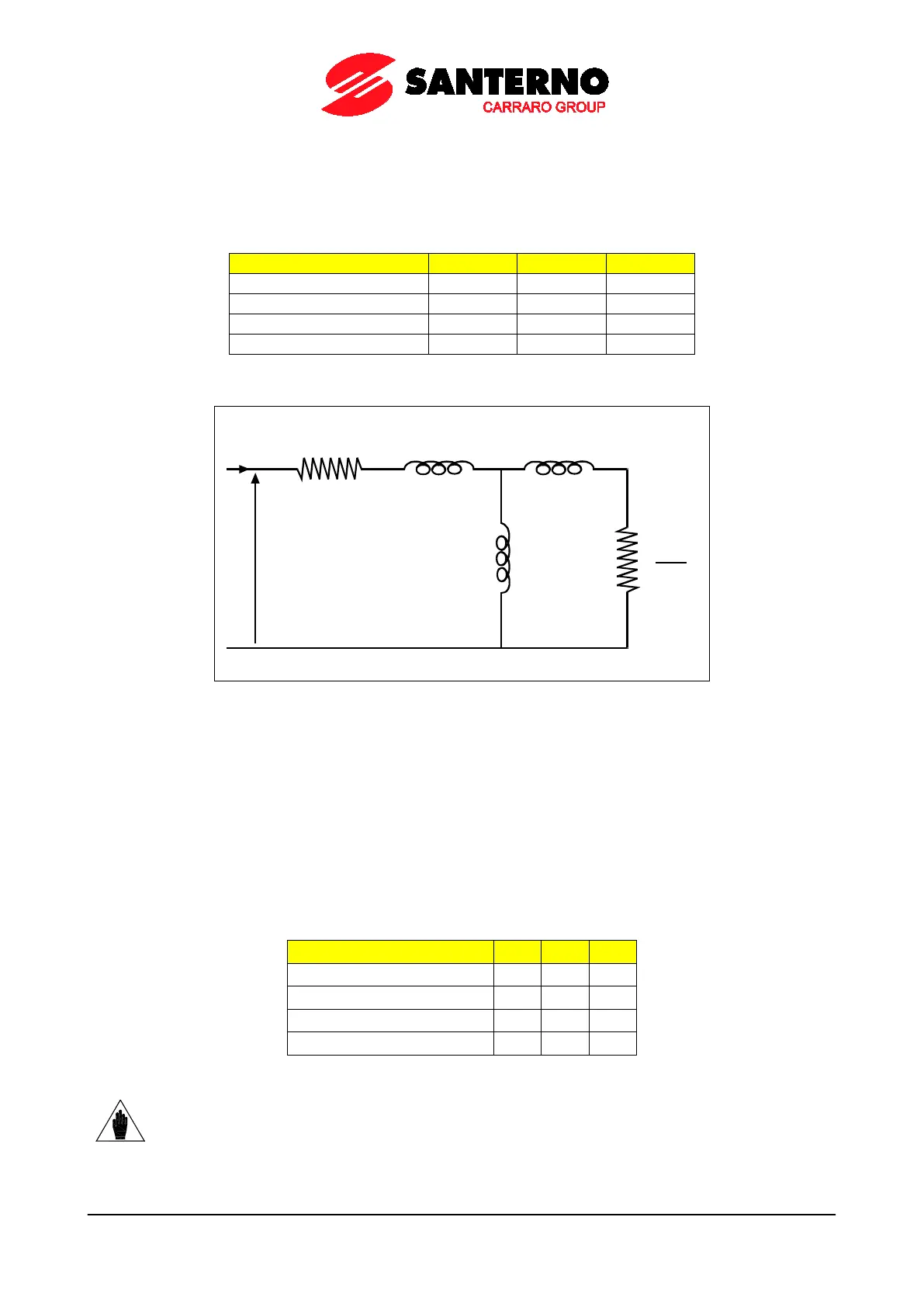
Figure 42: Equivalent circuit of the asynchronous machine
Where:
Rs: Stator resistance (wires included)
Rr: Rotor resistance
l
1
+l
2
: Full leakage inductance
M: Mutual inductance (not required for control implementation)
S: Slip
τ rot. ≅ M / Rr rotor time constant.
Because the motor characteristics are generally unknown, the Sinus Penta is capable of automatically determining the
motor characteristics (see the FIRST STARTUP section and the AUTOTUNE MENU).
However, some parameters may be manually adjusted to meet the requirements needed for special applications.
The parameters used for the different control algorithms are stated in the table below.
Table 75: Motor parameters used by control algorithms
Parameter IFD VTC FOC
Stator resistance
ν
ν
ν
Leakage inductance
ν
Mutual inductance
ν ν
Rotor time constant
ν ν
ν Used ;
Not used
NOTE
Because the v
alue of the stator resistance is used for any type of control,
always perform the autotune procedure with I073 = Motor Tune and I074 =
0: Motor Params.