SINUS PENTA
PROGRAMMING GUIDE
172/486
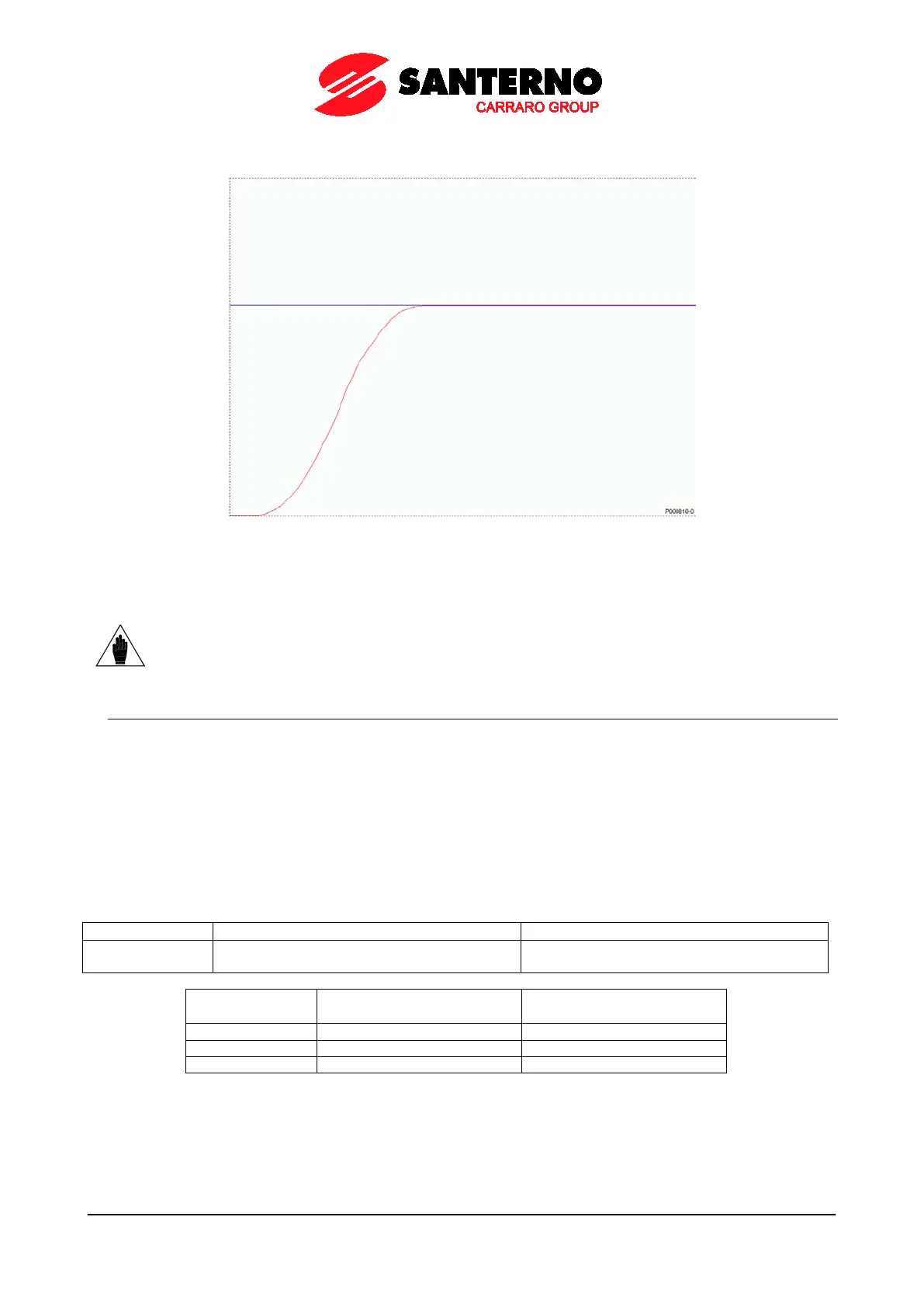
Figure 26: Response to a system tuned with the method of Ziegler and Nichols
NOTE
The method of Ziegler and Nichols is not always applicable, because some systems do not
produce any oscillations, even in presence of large proportional gains.
However, leading a system close to instability can be very dangerous.
24.3. Manual Tuning of the PI Regulator
The PI regulator con be manually tuned when the tuning method of Ziegler and Nichols is not applicable. The sections
below cover the following:
• how the transient is affected from the proportional action when the integral action is kept constant in a PI
regulator;
• how the transient is affected from the integral action when the proportional action is kept constant in a PI
regulator;
• how the transient is affected from the derivative action in a PID regulator.
24.3.1. PROPORTIONAL ACTION (P)
Kp
An input variance (error) produces an output
variance proportional to the variance amplitude
Changes the tuning variable based on the
variable being tuned
Response to the step Response time