SINUS PENTA
PROGRAMMING GUIDE
352/486
38.1.3. WHEN USING TWO ENCODERS
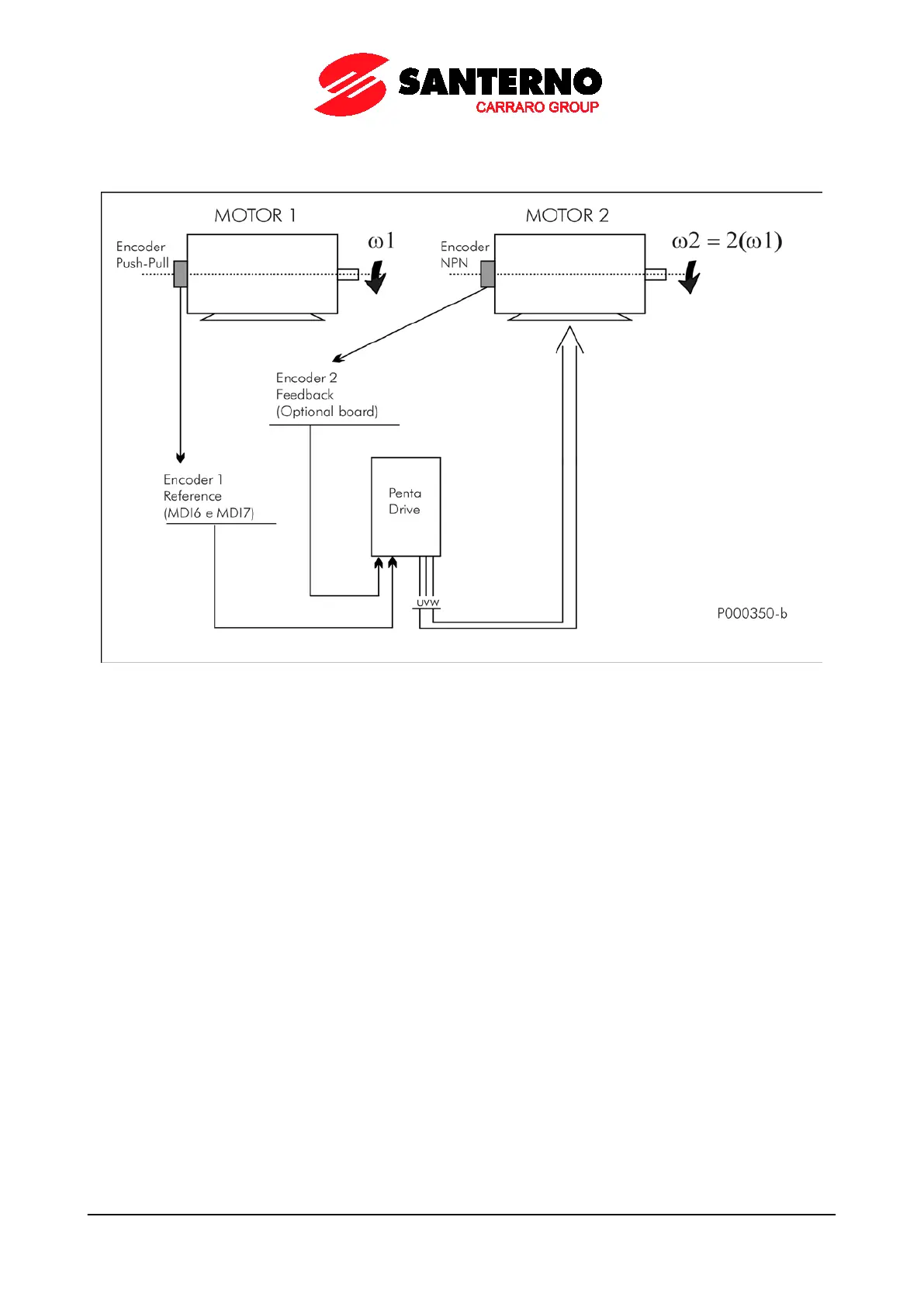
Figure 55: Using two encoders (example)
Suppose that motor 2 is to be controlled in closed chain and that its speed value is twice the speed value of motor 1.
To do so, use speed of motor 1, provided with an encoder, as the reference for the Penta Drive, and use the speed
measure of encoder B, which is coaxial to the motor controlled by the drive, as a speed feedback.
Suppose that motor 1 speed ranges from 0 to 750rpm and that motor 1 is provided with a Push–Pull encoder with
Single–Ended outputs and that its resolution is 2048 pls/rev.
Motor 2 is provided with an NPN encoder with Single–Ended outputs; its resolution is 1024 pls/rev.
Only one Push-Pull encoder can be connected to digital inputs MDI6-MDI7, so encoder NPN of motor 2, representing
the speed feedback of the drive, must be connected to ES836 board (drive Encoder B), whereas the encoder of motor 1
(Push–Pull), used as a reference, shall be connected to terminals MDI6 and MDI7 (drive Encoder A).
Encoder Configuration is as follows:
Encoder/Frequency Inputs Menu
(operating modes and encoder feature setting)
C189 = [6: A–Reference B–Feedback] (Encoder/Frequency input operating mode)
C190 = 2048 pls/rev (Number of pls/rev for Encoder A)
C191 = 1024 pls/rev (Number of pls/rev for Encoder B)
C197 = [0: 2Ch.Quad.] (Number of channels of Encoder A)
C198 = [0: 2Ch.Quad.] (Number of channels of Encoder B)
C199 = [0: Fdbk.No Ref.No] (Encoder reading sign reversal)