6 – 30
Chapter 6 Principles of Operation
6.2 ROS Control
6.2.1 Rotation of Scanner Motor
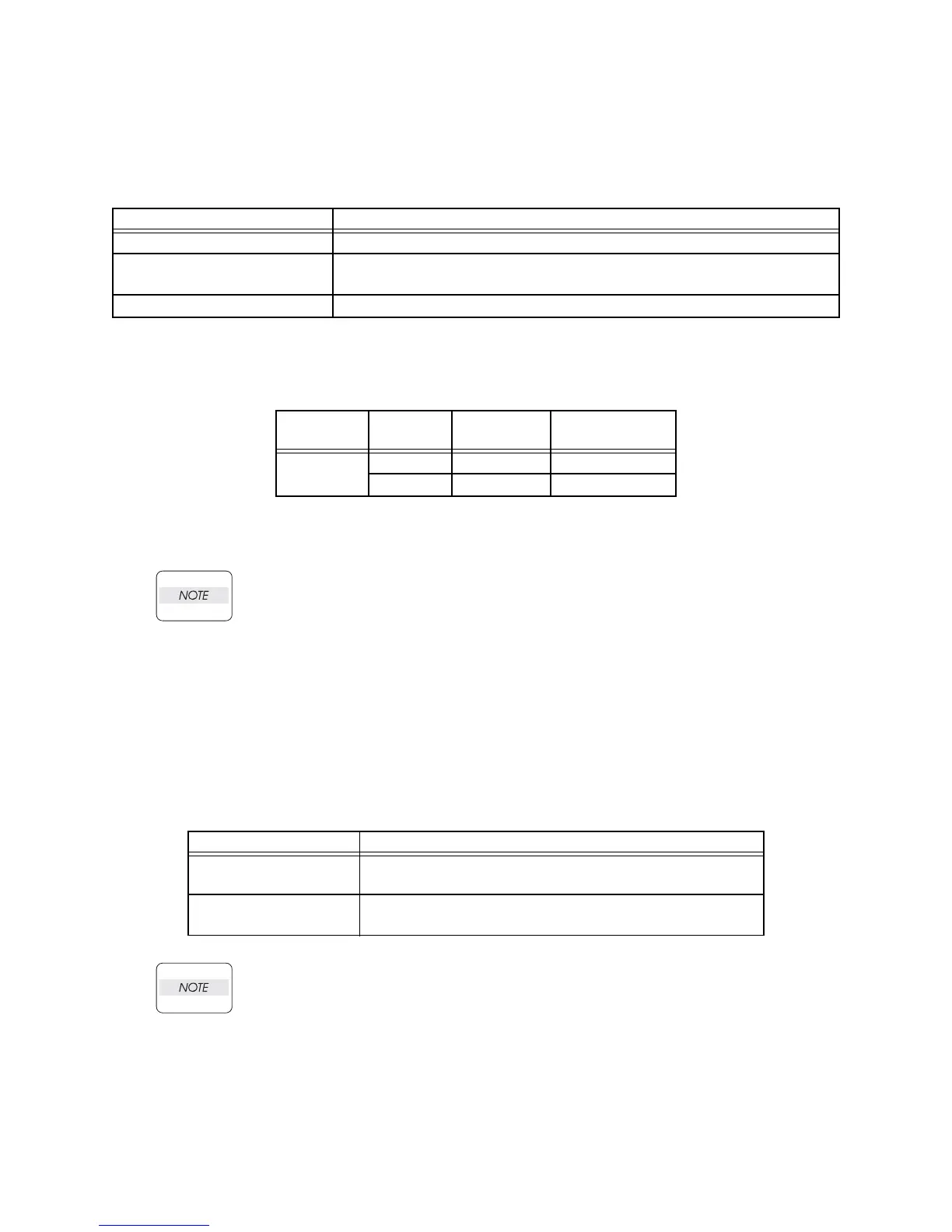
The control (ON/OFF) of the rotation of the Scanner Motor is performed as shown below according
to the mode of operation.
The following table gives the resolution that differs according to the specifications of the machine,
and the corresponding rotational speeds of the Scanner Motor.
dpi (dot per inch)
rpm (revolutions per minute)
Each facet of the Polygon Mirror (12 facets) is scanned with a laser beam.
6.2.2 Warm-up of ROS
The Scanner Motor rotates simultaneously with the warm-up of the ROS. The SOS signal is
sampled at intervals of 100 ms. If the obtained value is shorter than the Ready reference value three
consecutive times, the warm-up of the ROS is ended (The Scanner Motor is rotating at a constant
speed).
6.2.3 ROS Reference Value
If the speed of the Scanner Motor increases by more than 1%, the laser beam does
not enter the SOS Sensor, and "U2" is detected in terms of Fail reference value.
Mode of operation ON/OFF of rotation of Scanner Motor
Standby state Kept OFF.
Printing state
Turned on by receiving signal from the Controller, and turned off after 10 s
since end of printing.
Power-saving state Kept OFF.
Process
Speed
Resolu-
tion
RPM of
Scanner
CLK signal fre-
quency
269mm/s
600dpi 31,772rpm 3,177.2Hz
1200dpi 31,772rpm 3,177.2Hz
ROS reference value Description
Ready reference value
SOS signal interval corresponding to less than 98% of the
specified rotational speed of the Scanner Motor
Fail reference value
SOS signal interval corresponding to less than 90% of the
specified rotational speed of the Scanner Motor