Arm
®
CoreLink™ GIC-600AE Generic Interrupt Controller
Technical Reference Manual
Document ID: 101206_0003_04_en
Issue: 04
Functional Safety
Implementation skew
Silicon skew due to asynchronous clock domain crossings or other factors.
Temporal delay skew
Skew between lock-step primary and redundant logic blocks.
Since the GIC-600AE SAF detector counts to 64 before flagging an SAF, the permitted skew is
calculated as follows:
•
Maximum skew allowed = 64 / CR
Example 6-1: Q-Channel skew calculation
•
GIC clock frequency = 1000MHz
•
Q-Channel frequency = 125MHz
Based on these frequencies, then:
•
CR = (GIC clock frequency)/(channel controller clock frequency) = 1000MHz / 125MHz = 8.
•
Maximum skew allowed = 64 / CR = 64 / 8 = 8 cycles.
Therefore, the system integrator is allowed eight cycles for implementation skew and temporal
delay skew that originate from the SoC Q-Channel controller.
6.10.2 Transient faults
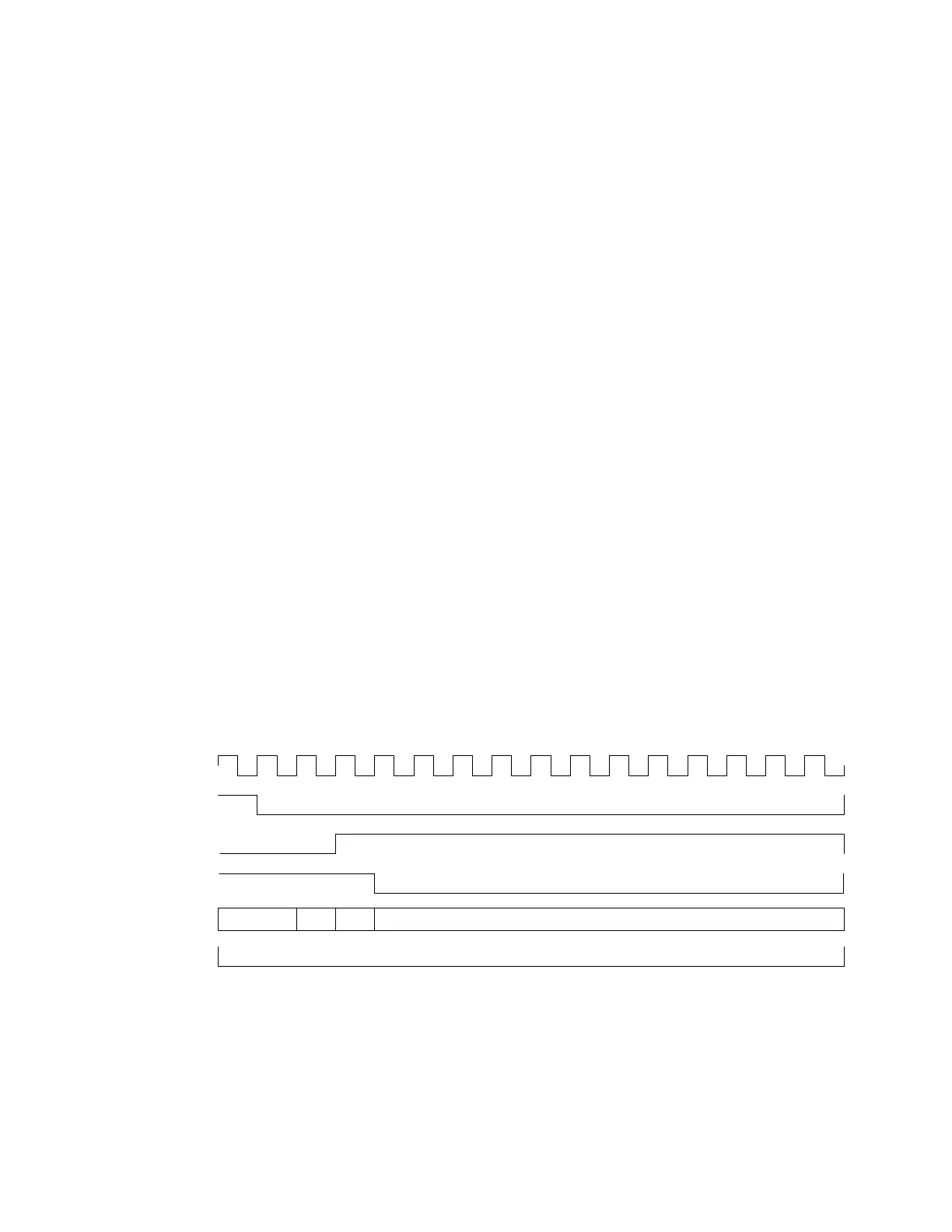
The following figure shows the normal situation with no fault.
Figure 6-15: Normal assertion of qreqn and qreqn_chk signals
63 62 61 63
Error
Count
QREQn_chk
QREQn
clk
QREQn_int
The following figure shows how a transient fault on the qreqn signal is filtered.
Copyright © 2018–2020, 2022 Arm Limited (or its affiliates). All rights reserved.
Non-Confidential
Page 236 of 268