The Z-Drive and the Pipette Module
DSX™ System Service Manual 6-13
•
•
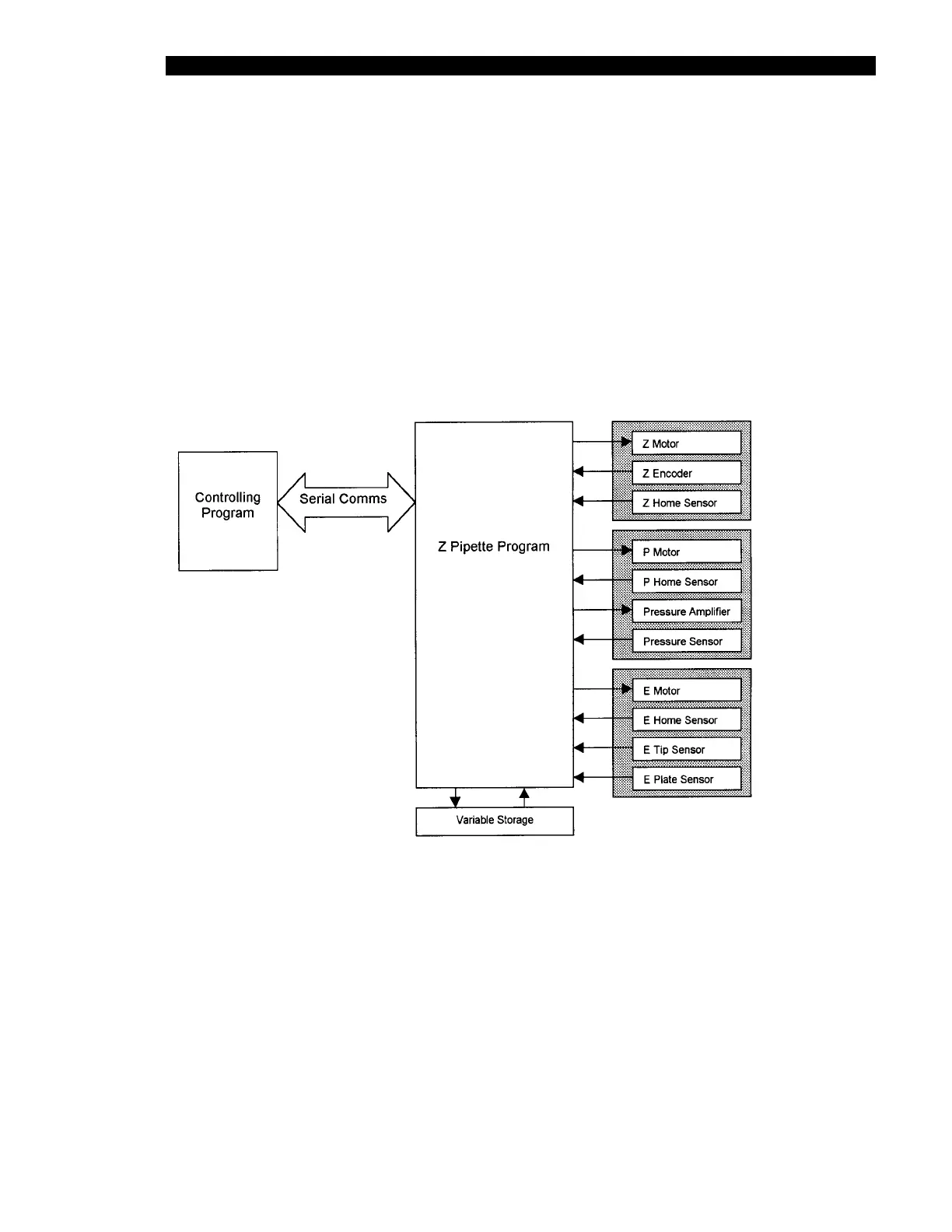
6.3.2 Command Types
Command types for the Z-axis and pipette module fall into the following two categories:
Motion commands cause the Z/Pipette program to drive the Z, P or E motors and to
read the Z encoder to check that the correct Z position has been achieved. The home
sensors, one for each motor, are used to position each motor at its home position and
setting its step position to zero.
Data commands cause the Z/Pipette program to write and/or read the state of internal
variables such as the value of the home offsets, and external variables such as the
value of the Z encoder.
The Data Flow diagram is presented in Figure 6-9.
Figure 6-9 Data Flow Diagram