5. PARAMETERS
5 - 3
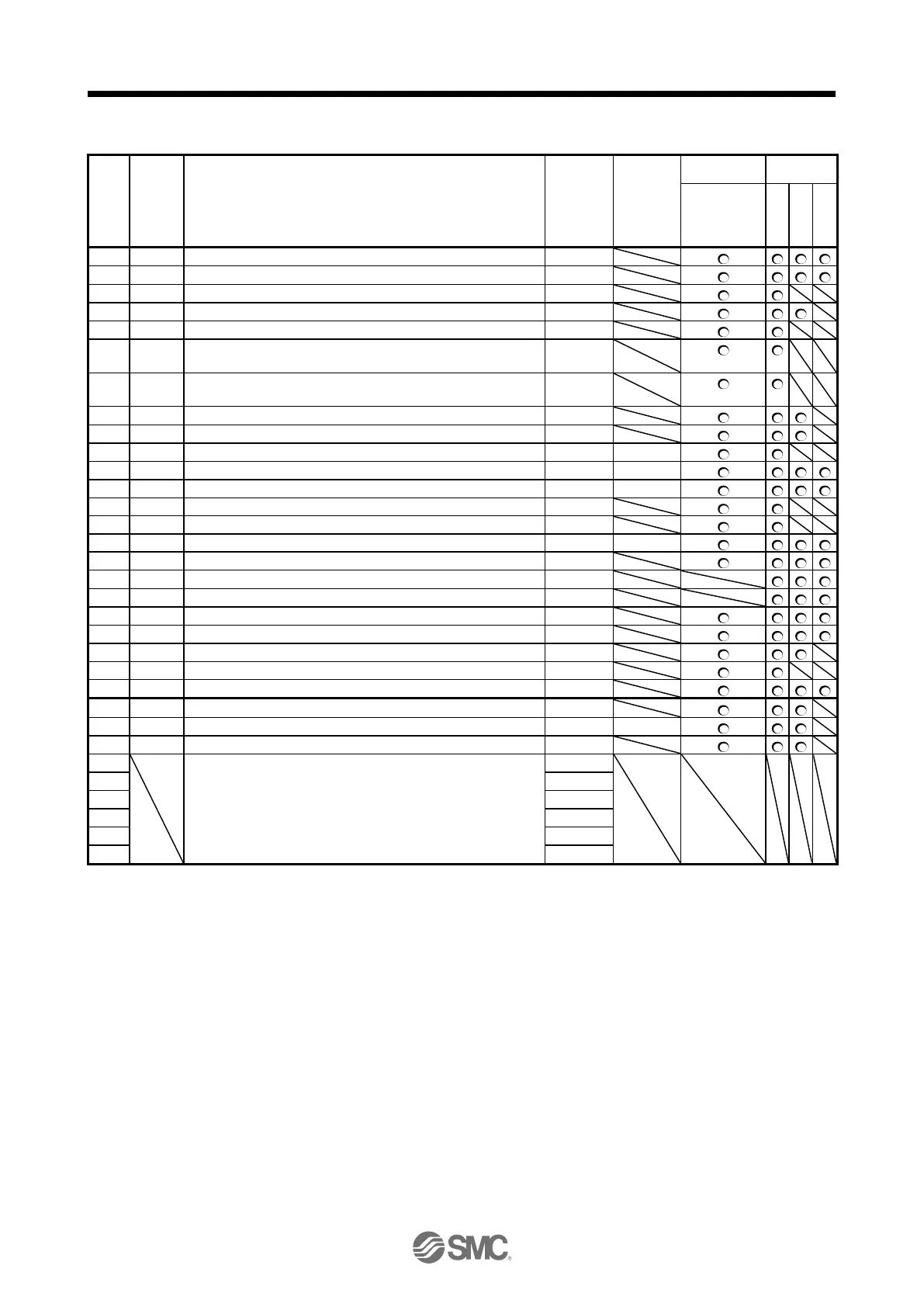
5.1.1 Basic setting parameters ([Pr. PA_ _ ])
Absolute position detection system
Number of command input pulses per revolution
Electronic gear numerator (command pulse multiplication
numerator)
Electronic gear denominator (command pulse multiplication
denominator)
Forward rotation torque limit/positive direction thrust limit
Reverse rotation torque limit/negative direction thrust limit
Rotation direction selection/travel direction selection
Servo motor series setting
Parameter writing inhibit
Position control composition selection
Drive recorder arbitrary alarm trigger setting
One-touch tuning - Overshoot permissible level

 Loading...
Loading...