17.8.3 Pushing direction error
If the relationship between Positioning start position, Pushing start position, and Push limit position
does not satisfy
Positioning start position<Pushing start position≦Push limit position,or
Positioning start position>Pushing start position≧Push limit position,
[AL7F.3 Pushing direction error] occurs after the command position reaches the Pushing start position,
and PERR (Pushing error) turns on. The dynamic brake operates and the servo motor stops.
RES (reset) resets the alarm and turns off PERR (Pushing error). PERR does not turn off with ST1
(start signal).
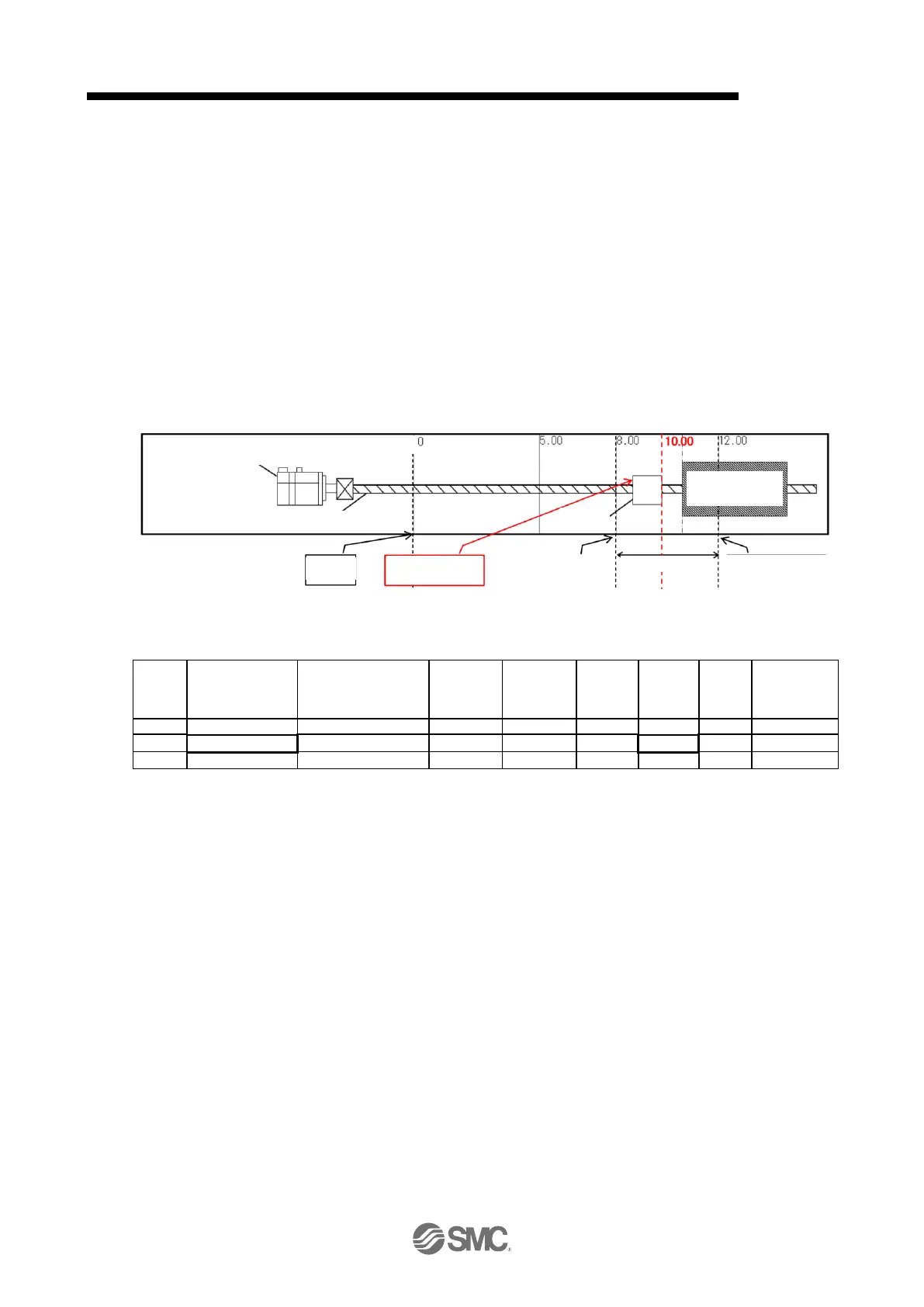
17.8.4 When the positioning start position including the pushing operation is incorrect
When the start signal (ST1) is turned on within the pushing range as shown below, [AL7F.3] is
generated after the current reaches the pushing start position.
In this case, move out of the pushing range and then start the point table including the pushing
operation again.
Alarm detection under these conditions can be detected when the pushing start position is set by an
absolute value command.
(1) Point table setting example
a) For positioning operation (absolute value command method) and pushing operation (absolute
value command method)

 Loading...
Loading...