16.12.6 Stopper type home position return
For the stopper type home position return, by using the JOG operation, manual pulse generator operation,
or others, a workpiece is pressed against a mechanical stopper, and the position where it is stopped is used
as the home position.
(1) Device/parameter
Set input devices and parameters as shown below.
Automatic operation mode of
the program method
MD0 (Operation mode selection 1)
Stopper type home position
return
_ _ _ 3: Select the stopper type.
Home position return
direction
Refer to (2) of section 5.4.1 to select the home
position return direction.
Home position return speed
Set the rotation speed until the workpiece is
pressed against the mechanical stopper.
Set the time from when the home position data is
obtained after the workpiece is pressed against the
stopper until when ZP (home position return
completion) is outputted.
Stopper type home position
return torque limit value
Set the servo motor torque limit value at the
execution of the stopper type home position return.
Home position return
acceleration time constant
The acceleration time constant set for [Pr. PC30]
is used.
Home position return
deceleration time constant
The deceleration time constant set for [Pr. PC31]
is used.
Home position return position
data
Set the current position at the home position return
completion.
DI0 (Program No. selection 1) to
DI7 (Program No. selection 8)
Select a program containing a "ZRT" command,
which performs the home position return.
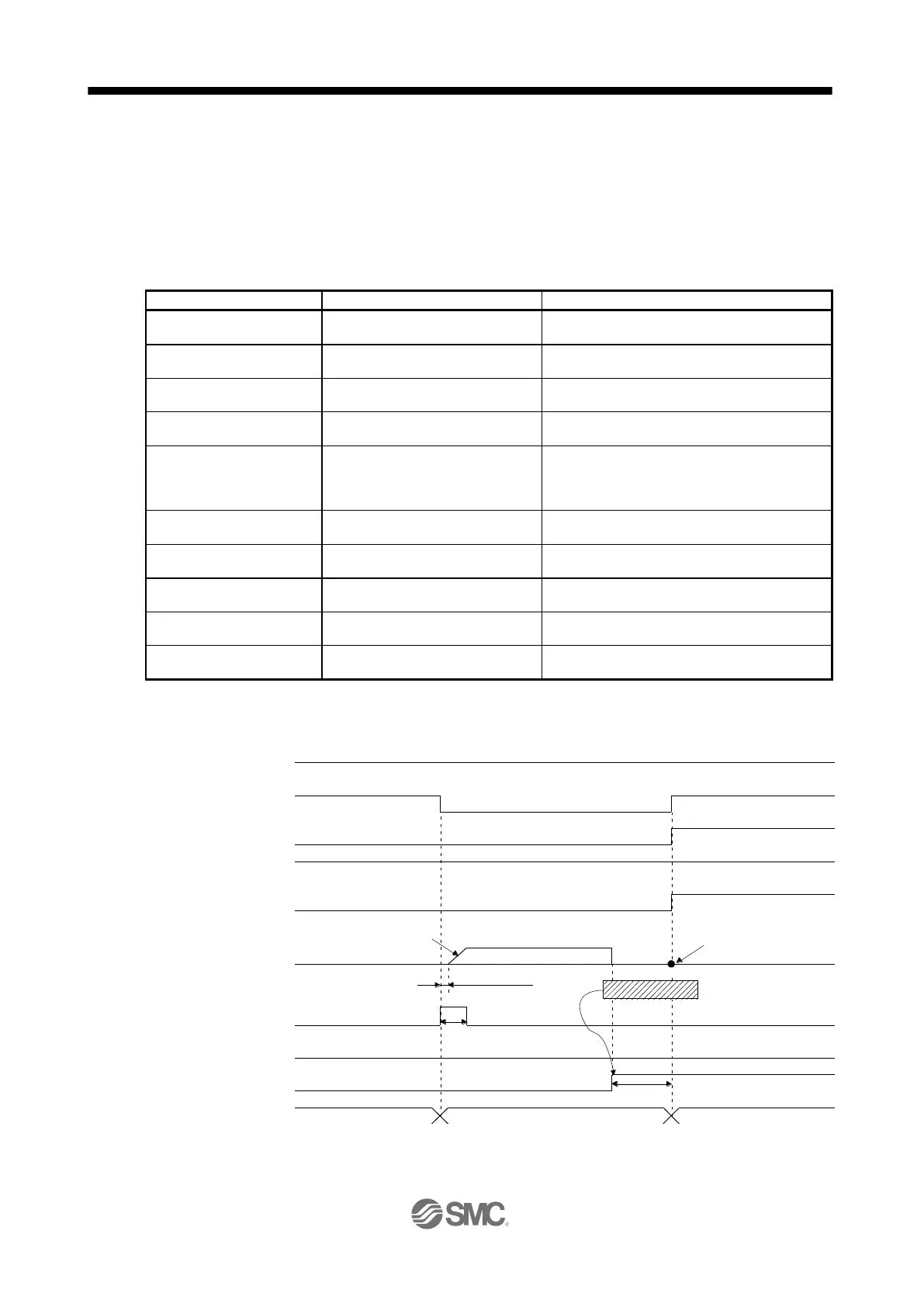
(2) Timing chart
The following shows a timing chart after a program containing a "ZRT" command is selected.
The following torque limits are enabled.
ON
OFF
MEND (Travel completion)
ON
OFF
CPO (Rough match)
ON
OFF
ST2 (Reverse rotation start)
MD0 (Operation mode selection 1)
ON
OFF
ON
OFF
TLC (Limiting torque)
Torque limit value
ZP
(Home position return completion)
ON
OFF
Servo motor speed
Forward rotation
0 r/min
Reverse rotation
ST1 (Forward rotation start)
ON
OFF
Acceleration time constant
Home position return speed
Home position return
position data
3 ms or shorter
5 ms or longer
Stopper time
[Pr. PC35] [Pr. PT11] (Note) [Pr. PC35]
PED (Position end)
ON
OFF
Stopper

 Loading...
Loading...