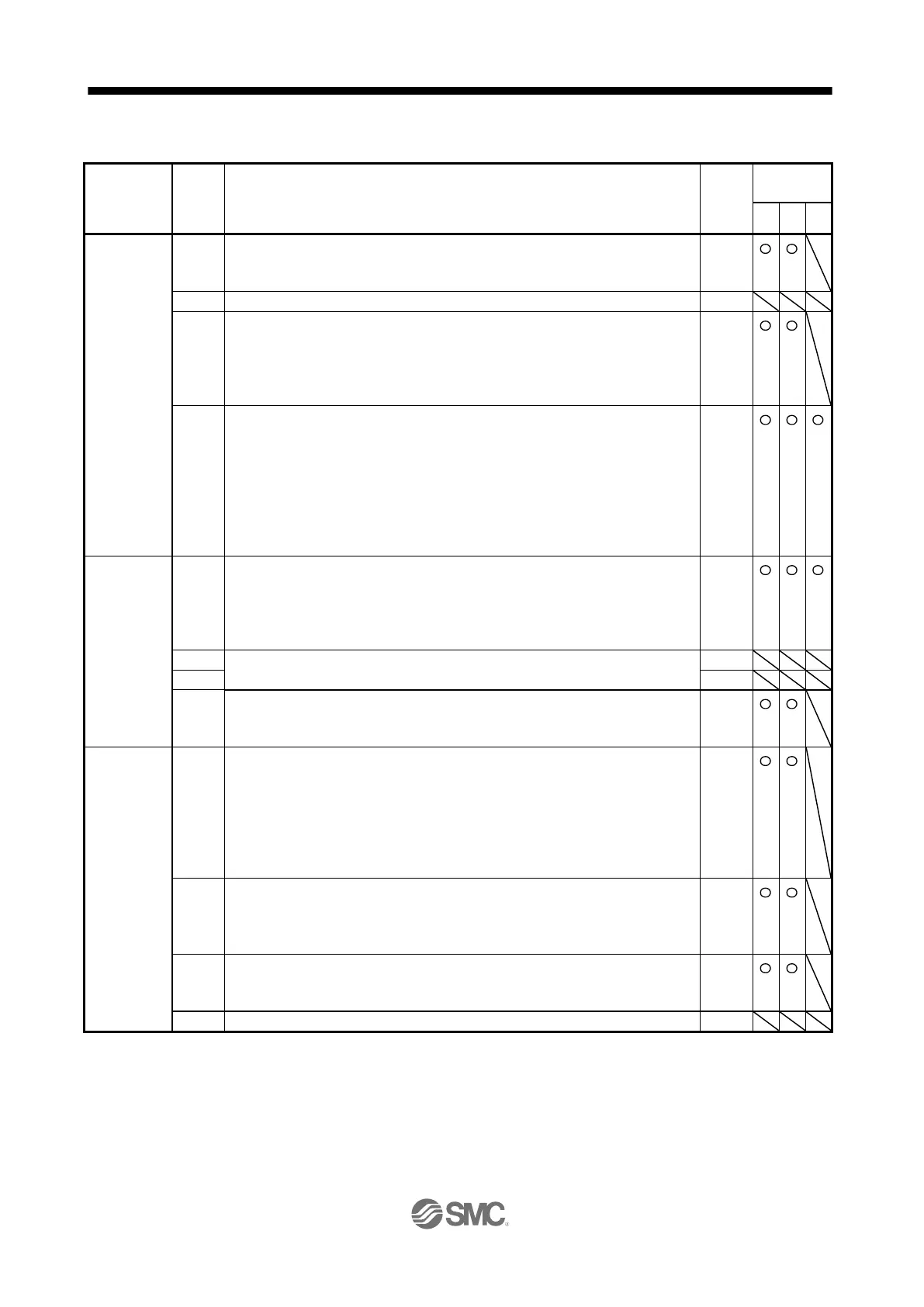
16.22.7 Positioning control parameters ([Pr. PT_ _ ])
PT01
*CTY
Command
mode
selection
Positioning command method selection
0: Absolute value command method
1: Incremental value command method
Position data unit
0: mm
1: inch
2: degree
3: pulse
RS-422 communication - Previous model equivalent selection
0: Disabled (LECSB
□
-T
□
)
1: Enabled (equivalent to LECSB
□
-S
□
)
For the communication command of the Mitsubishi general-purpose AC servo
protocol, the status display and read/write commands of input/output devices can be
used with the data Nos. and bit assignment of the same as previous models.
When this digit is "1" or "2", setup software (MR Configurator2
TM
) cannot be used
with the USB communication.
PT02
*TOP1
Function
selection T-1
Follow-up of SON (Servo-on) off/EM2 (Forced stop 2) off with absolute value
command method in incremental system
0: Disabled (Home position is erased at servo-off or EM2 off.)
1: Enabled (Home position is not erased even if servo-off, EM2 off, or alarm
occurrence which can be canceled with reset. The operation can be continued.)
Point table/program writing inhibit
0: Allow
1: Inhibit
PT03
*FTY
Feeding
function
selection
Feed length multiplication [STM]
0: × 1
1: × 10
2: × 100
3: × 1000
This digit will be disabled when [degree] or [pulse] of "Position data unit" is set in [Pr.
PT01].
Manual pulse generator multiplication
0: × 1
1: × 10
2: × 100
Shortest rotation selection per degree
0: Rotation direction specifying
1: Shortest rotation

 Loading...
Loading...