17.Positioning mode (pushing operation)
17.9 PARAMETERS
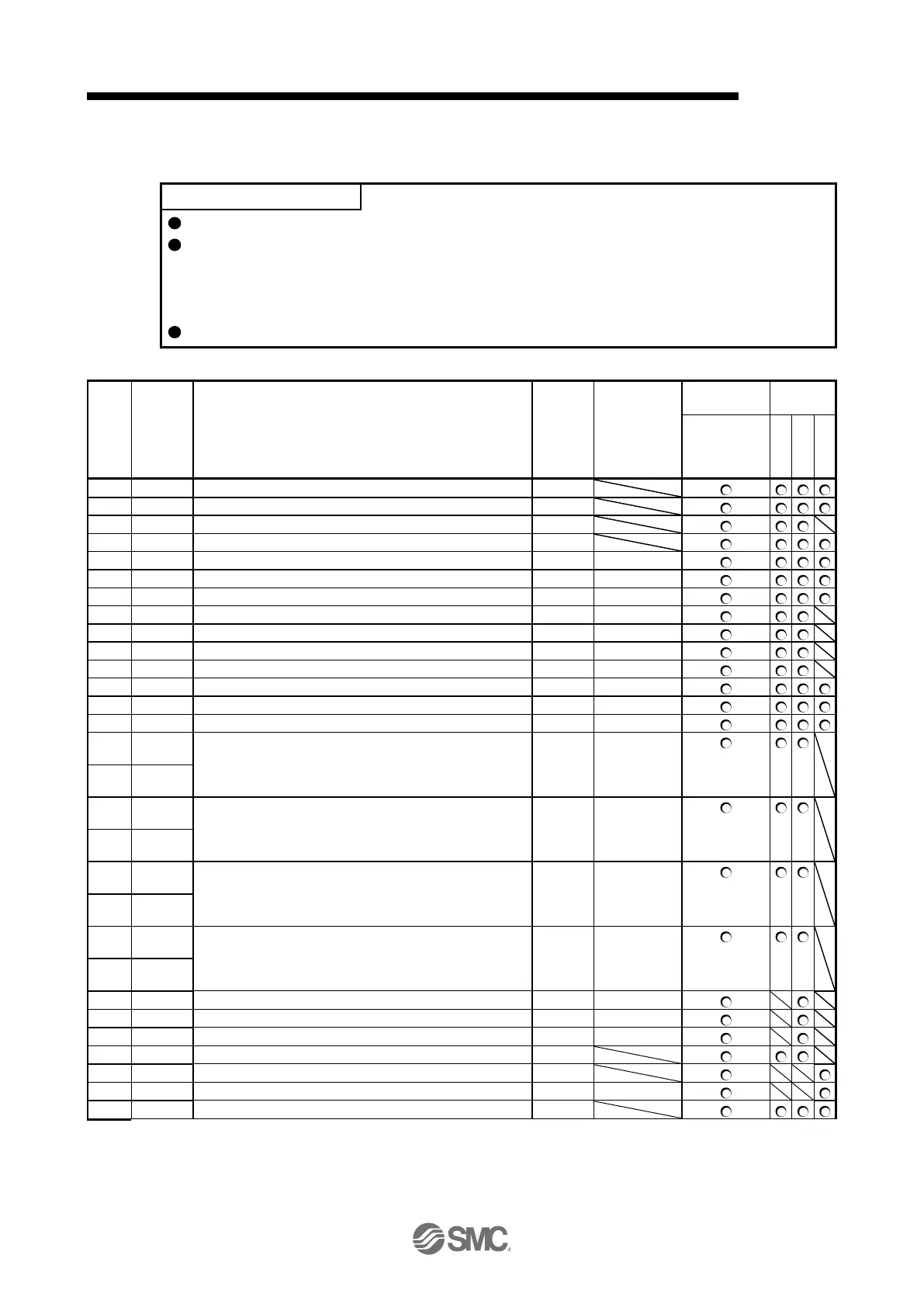
Refer to Chapter 16 for items not described in this chapter.
To enable a parameter whose symbol is preceded by *, cycle the power after setting it.
The symbols in the control mode column mean as follows.
CP: Positioning mode (point table method)
CL: Positioning mode (program method)
PS: Positioning mode (indexer method)
Setting a value out of the setting range in each parameter will trigger [AL. 37 Parameter error].
17.9.1 Positioning control parameters ([Pr. PT_ _ ])
Feeding function selection
Home position return type
Home position return speed
Home position shift distance
Home position return position data
Travel distance after proximity dog
Stopper type home position return stopper time
Stopper type home position return torque limit value
Position range output address +
Position range output address -
Number of stations per rotation

 Loading...
Loading...