1. FUNCTIONS AND CONFIGURATION
1 - 5
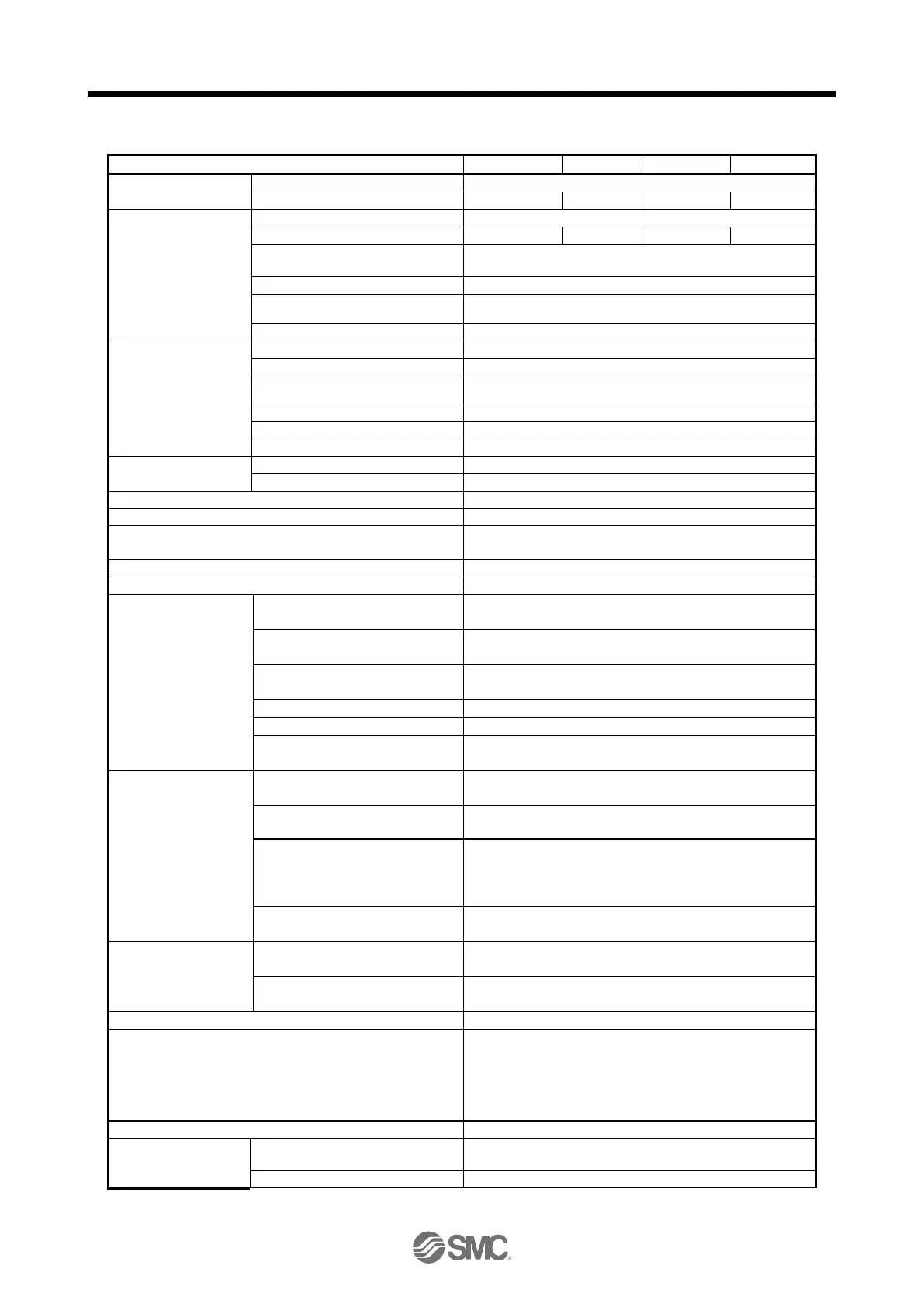
1.3 Driver standard specifications
Main circuit power
supply
3-phase or 1-phase 200 V AC to 240 V AC, 50 Hz/60 Hz
Permissible voltage
fluctuation
3-phase or 1-phase 170 V AC to
264 V AC
Permissible frequency fluctuation
Power supply capacity
[kVA]
Control circuit power
supply
1-phase 200 V AC to 240 V AC, 50 Hz/60 Hz
Permissible voltage
fluctuation
1-phase 170 V AC to 264 V AC
Permissible frequency fluctuation
(Note 1) 0.5 (including CN8 connector signals)
Sine-wave PWM control, current control method
USB: connection to a personal computer or others
(setup software (MR Configurator2
TM
)-compatible)
Compatible (A/B/Z-phase pulse)
Max. input pulse frequency
4 Mpulses/s (for differential receiver) (Note 6),
200 kpulses/s (for open collector)
Positioning feedback pulse
Encoder resolution
(resolution per servo motor revolution): 22 bits
Command pulse multiplying factor
Electronic gear A:1 to 16777215,
B:1 to 16777215, 1/10 < A/B < 4000
In-position range setting
0 pulse to ±65535 pulses (command pulse unit)
Set by parameter setting or external analog input
(0 V DC to +10 V DC/maximum torque)
Analog speed command 1: 2000,
Internal speed command 1: 5000
Analog speed command input
0 to ±10 V DC/rated speed (The speed at 10 V is changeable
with [Pr. PC12].)
±0.01% or less (load fluctuation: 0% to 100%),
0% (power fluctuation: ±10%)
±0.2% or less (ambient temperature: 25 °C ± 10 °C)
when using analog speed command
Set by parameter setting or external analog input
(0 V DC to +10 V DC/maximum torque)
Analog torque command input
0 V DC to ±8 V DC/maximum torque
(input impedance 10 kΩ to 12 kΩ )
Set by parameter setting or external analog input
(0 V DC to 10 V DC/rated speed)
Overcurrent shut-off, regenerative overvoltage shut-off,
overload shut-off (electronic thermal), servo motor overheat
protection, encoder error protection, regenerative error
protection, undervoltage protection, instantaneous power
failure protection, overspeed protection, error excessive
protection
Standards certified by CB
EN ISO 13849-1 category 3 PL e, EN 61508 SIL 3, EN 62061
SIL CL 3, and EN 61800-5-2
8 ms or less (STO input off → energy shut off)

 Loading...
Loading...