16.5 AUTOMATIC OPERATION MODE
16.5.1 Automatic operation mode
(1) Command method
Start operation using ST1 (Forward rotation start) or ST2 (Reverse rotation start). Absolute value
command method and incremental value command method are provided in automatic operation mode.
(a) Absolute value command method
As position data, set the target address to be reached.
1) Millimeter, inch, and pulse unit
Setting range: -999999 to 999999 [×10
STM
μm] (STM = Feed length multiplication [Pr. PT03])
-999999 to 999999 [×10
(STM-4)
inch] (STM = Feed length multiplication [Pr. PT03])
-999999 to 999999 [pulse]
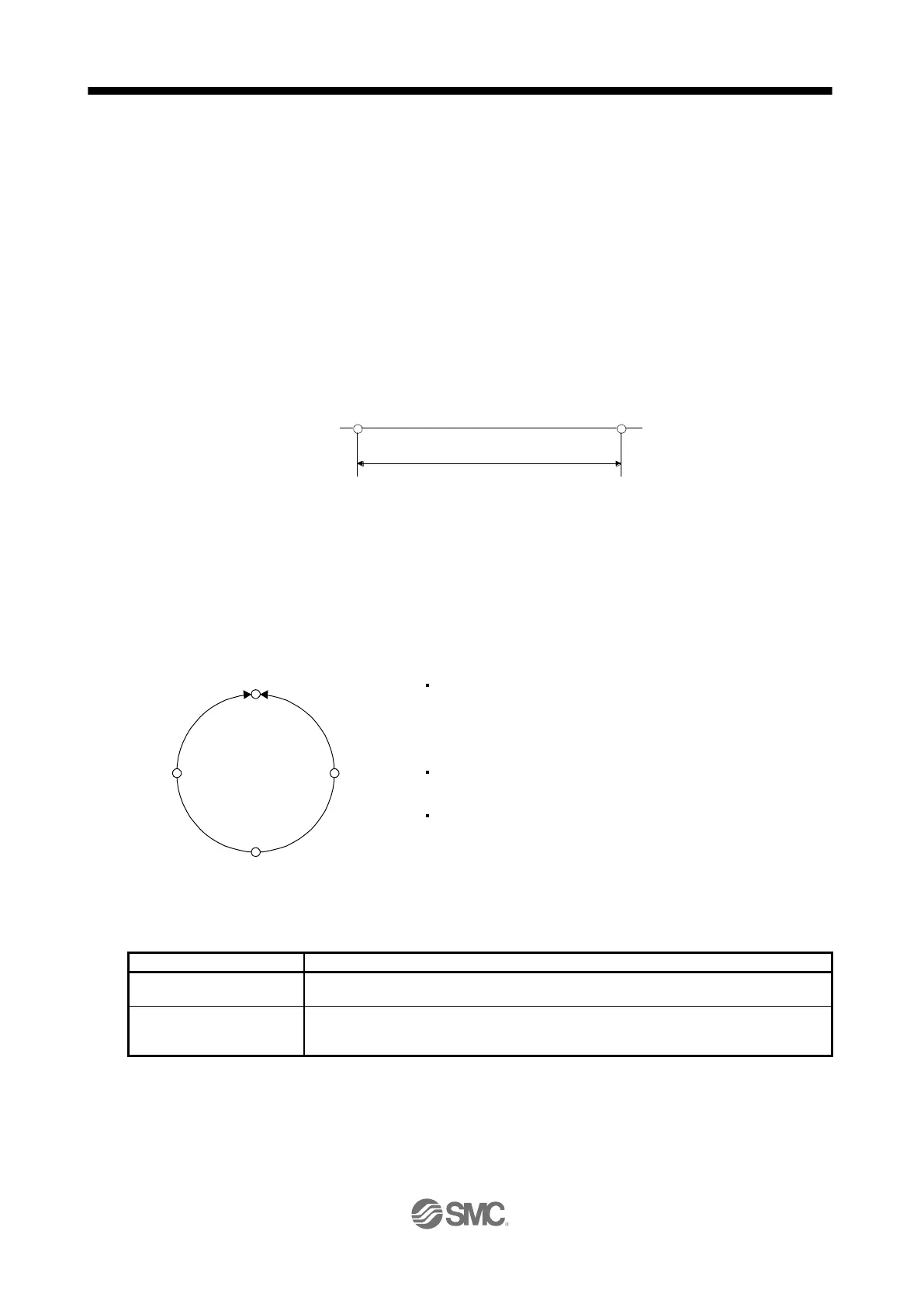
2) Degree unit
Set the target position by indicating the CCW direction with a "+" sign and the CW direction with a
"-" sign.
Under the absolute value command method, the rotation direction can be specified with a "+" or
"-" sign.
An example of setting is shown below.
Coordinate system in degrees
The coordinate is determined by referring to the position
of 0 degree.
+ direction: 0 → 90 → 180 → 270 → 0
- direction: 0 → -90 → -180 → -270 → -360
The positions of 270 degrees and -90 degrees are the
same.
The positions of 0 degree, 360 degrees and -360 degrees
are the same.
The servo motor rotates from the current position to the target position in the shorter direction.
If the distances from the current position to the target position are the same for CCW and CW,
the servo motor rotates in the CCW direction.

 Loading...
Loading...