After the one-touch tuning is completed, "Gain adjustment mode selection" in [Pr.
PA08] will be set to "2 gain adjustment mode 2 (_ _ _ 4)". To estimate [Pr. PB06
Load to motor inertia ratio/load to motor mass ratio], set "Gain adjustment mode
selection" in [Pr. PA08] to "Auto tuning mode 1 (_ _ _ 1)".
When executing the one-touch tuning, check the [Pr. PA21 One-touch tuning
function selection] is "_ _ _ 1" (initial value).
At start of the one-touch tuning, only when "Auto tuning mode 1 (_ _ _ 1)" or "2
gain adjustment mode 1 (interpolation mode) (_ _ _ 0)" of "Gain adjustment
mode selection" is selected in [Pr. PA08], [Pr. PB06 Load to motor inertia ratio]
will be estimated.
The driver command method can be used with the setup software (MR
Configurator2
TM
) with software version 1.45X or later.
When the one-touch tuning is executed in the driver command method, setup
software (MR Configurator2
TM
) is required.
The one-touch tuning includes two methods: the user command method and the driver command method.
(1) User command method
You can execute the one-touch tuning with setup software (MR Configurator2
TM
) or push buttons. The
user command method performs one-touch tuning by inputting commands from outside the driver.
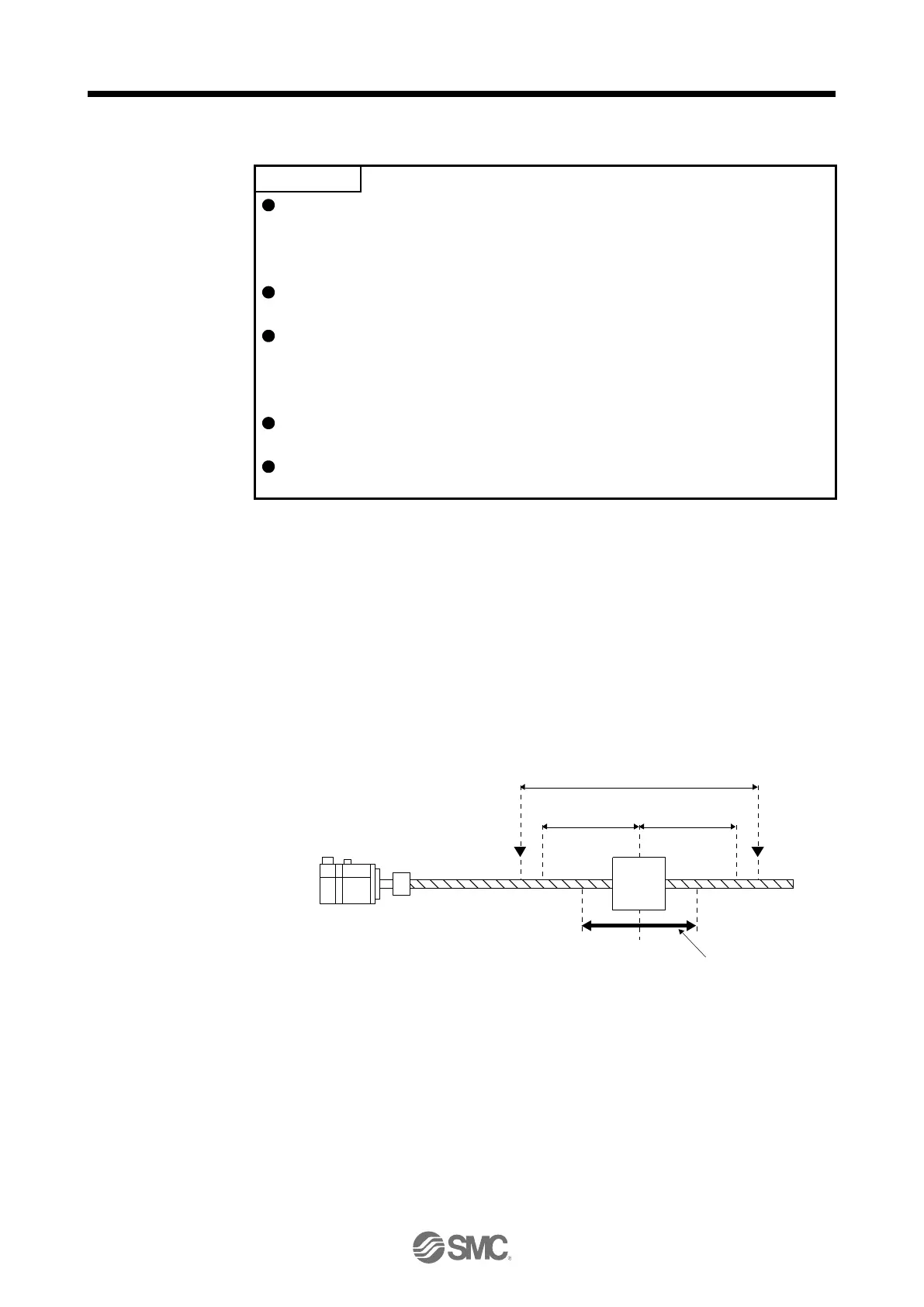
(2) Driver command method
You can execute the one-touch tuning with setup software (MR Configurator2
TM
). In the driver command
method, when you simply input a travel distance (permissible travel distance) that collision against the
equipment does not occur during servo motor driving, a command for the optimum tuning will be
generated inside the driver to perform one-touch tuning.

 Loading...
Loading...